geeky NEWS: Navigating the New Age of Cutting-Edge Technology in AI, Robotics, Space, and the latest tech Gadgets
As a passionate tech blogger and vlogger, I specialize in four exciting areas: AI, robotics, space, and the latest gadgets. Drawing on my extensive experience working at tech giants like Google and Qualcomm, I bring a unique perspective to my coverage. My portfolio combines critical analysis and infectious enthusiasm to keep tech enthusiasts informed and excited about the future of technology innovation.
MIT High-Speed Ping Pong Robot: The Future of Human-Machine Sports Training
AI Summary
MIT engineers have developed a ping pong robot using a lightweight, high-power robotic arm equipped with high-speed cameras and advanced control algorithms. This robot can track incoming balls, predict their trajectory, and return shots with remarkable speed and accuracy (around 88% success) using three different swing types (loops, drives, chops), reaching speeds up to 42 mph. The technology has implications beyond sports, potentially improving the capabilities of robots for dynamic tasks like search and rescue by enabling fast, precise object interception.
May 13 2025 10:27
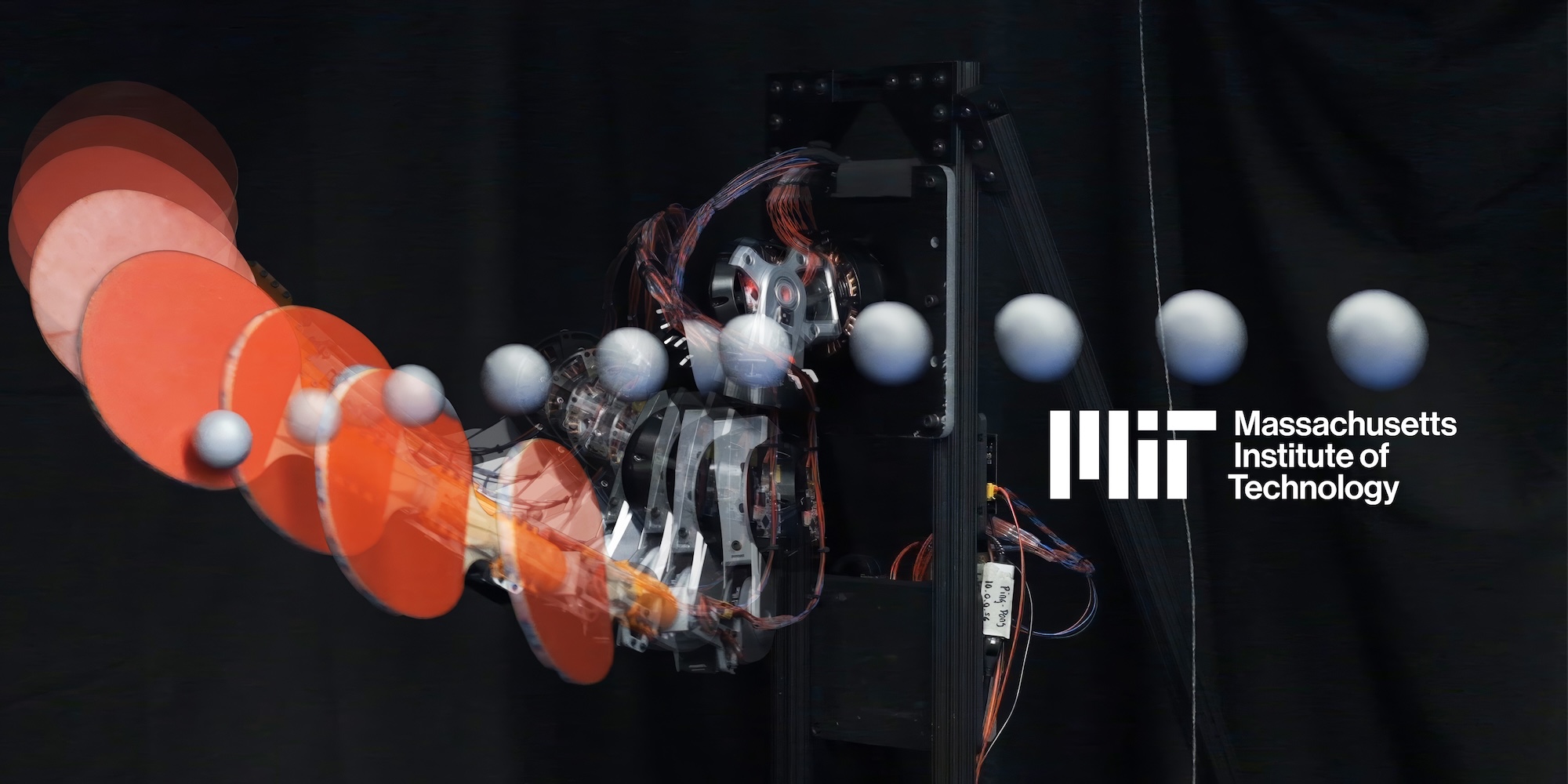
MIT engineers have developed a table tennis robot that can return shots with remarkable accuracy and speed. The system consists of a multi-jointed robotic arm fixed to one end of a ping pong table, equipped with a standard paddle. What makes this robot special is its combination of lightweight construction, high-power motors, and sophisticated control algorithms.
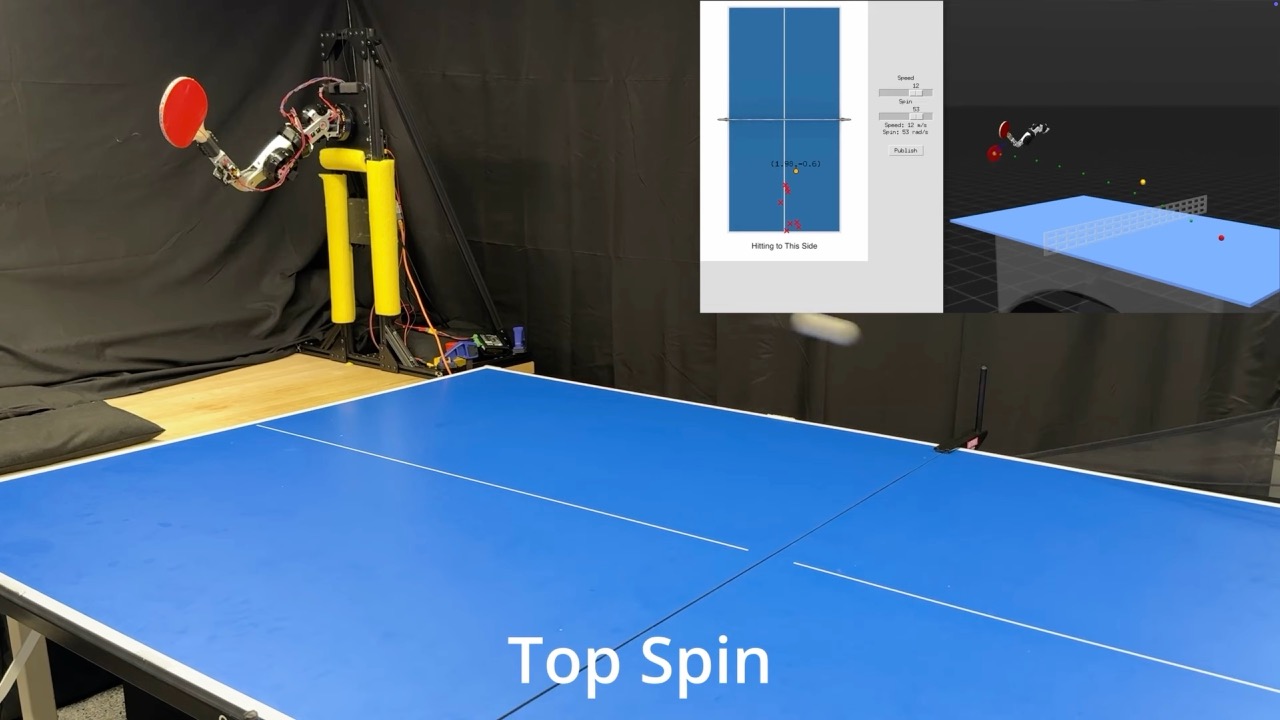
The robot uses several high-speed cameras positioned around the table to track incoming balls. Its high-bandwidth predictive control system quickly estimates the ball's trajectory and velocity, then calculates the optimal response in milliseconds. Most impressively, the robot can execute three different swing types—loops (topspin), drives (straight-on), and chops (backspin)—with almost equal proficiency.
In testing, the robot successfully returned about 88% of 150 consecutive shots across all three swing types. Its strike speed reaches up to 19 meters per second (approximately 42 mph), approaching the top return speeds of elite human players, who can hit between 47-56 mph.
Finding the Sweet Spot Between Precision and Speed
What makes the MIT ping pong robot particularly interesting is how it bridges two traditionally separate domains in robotics.
"If you think of the spectrum of control problems in robotics, we have on one end manipulation, which is usually slow and very precise, such as picking up an object and making sure you're grasping it well. On the other end, you have locomotion, which is about being dynamic and adapting to perturbations in your system," explains MIT graduate student David Nguyen, co-author of the study.
"Ping pong sits in between those. You're still doing manipulation, in that you have to be precise in hitting the ball, but you have to hit it within 300 milliseconds. So, it balances similar problems of dynamic locomotion and precise manipulation."
This middle ground is precisely why table tennis has been a robotics challenge since the 1980s. It requires a unique blend of technologies: high-speed machine vision, fast motors and actuators, precise control, accurate real-time prediction, and game strategy planning.
Beyond Previous Ping Pong Bots
While companies like Omron and Google DeepMind have created AI-powered ping pong robots that can rally with intermediate human players, MIT's approach differs in a significant way.
"These are really specialized robots designed to play ping pong," says Kendrick Cancio, another co-author of the study. "With our robot, we are exploring how the techniques used in playing ping pong could translate to a more generalized system, like a humanoid or anthropomorphic robot that can do many different, useful things."
In fact, the researchers modified a lightweight, high-power robotic arm that was originally developed as part of the MIT Humanoid—a bipedal, two-armed robot about the size of a small child. They simply added an additional degree of freedom in the wrist to allow for paddle control.
Robotic Training Partner with Human-Like Variations
The MIT team has recently upgraded their system to allow for targeted shots. By incorporating additional control algorithms, the robot can now predict not only how but where to hit an incoming ball. Users can set a target location on the table, and the robot will consistently hit the ball to that spot.
This capability, combined with the robot's ability to produce different types of spin, makes it potentially valuable as a training partner for human players.
"A big thing about table tennis is predicting the spin and trajectory of the ball, given how your opponent hit it, which is information that an automatic ball launcher won't give you," Cancio explains. "A robot like this could mimic the maneuvers that an opponent would do in a game environment, in a way that helps humans play and improve."
Currently, the robot's mobility is limited because it's fixed to the table, meaning it can only return balls that arrive within a crescent-shaped area around the midline. The engineers plan to mount the robot on a gantry or wheeled platform in the future, enabling it to cover more of the table and respond to a wider variety of shots.
From Ping Pong to Search and Rescue
The technology's implications extend far beyond ping pong tables. The researchers believe their advances could improve the speed and responsiveness of humanoid robots, particularly for urgent scenarios like search-and-rescue operations.
The problems that we're solving, specifically related to intercepting objects really quickly and precisely, could potentially be useful in scenarios where a robot has to carry out dynamic maneuvers and plan where its end effector will meet an object, in real-time
Imagine a rescue robot that needs to catch a falling object, quickly grasp a moving handle, or intercept a person who is about to fall. The same lightning-fast prediction and precision movement capabilities being developed for ping pong could prove invaluable.
The Technical Challenge
Creating a robot with this level of performance wasn't simple. The MIT team had to overcome several challenges:
Developing a lightweight arm with sufficient power for rapid acceleration
Creating algorithms that could predict ball trajectories in real-time
Designing a control system that could translate those predictions into precise motor commands within milliseconds
Implementing different swing styles that could impart varied spin to the ball
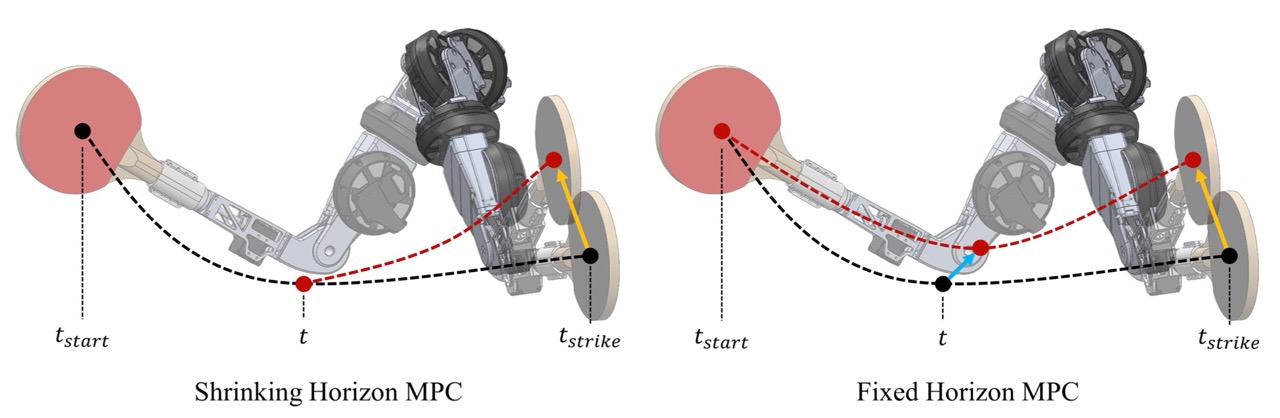
The robot's five-degree-of-freedom arm features custom-designed, high-torque motors with low rotor inertia, enabling exceptional acceleration. The team formulated an optimal control problem that constrains the state of the paddle at the moment of impact, with the terminal position determined by the predicted ball trajectory.
Three computers work simultaneously to process camera images, estimate the ball's real-time state, and translate these estimations into commands for the robot's motors.
The Future of Human-Robot Interaction
The MIT Humanoid project, from which this ping pong robot arm was derived, aims to eventually deploy robots for search-and-rescue operations. The team is testing various dynamic maneuvers, including navigating uneven terrain, jumping, running, and even doing backflips.
By combining the precision and speed demonstrated in the ping pong robot with advanced locomotion capabilities, future robots might be able to navigate disaster sites, quickly locate survivors, and perform delicate extraction operations—all with the same technology that lets them return a wicked topspin.
The researchers will present their work at the IEEE International Conference on Robotics and Automation (ICRA) this month. While robotic table tennis champions are still in development, the technology behind them is already pointing toward more capable, responsive robots across many domains. As Nguyen puts it:
Some of the goal of this project is to say we can reach the same level of athleticism that people have. And in terms of strike speed, we're getting really, really close.