geeky NEWS: Navigating the New Age of Cutting-Edge Technology in AI, Robotics, Space, and the latest tech Gadgets
As a passionate tech blogger and vlogger, I specialize in four exciting areas: AI, robotics, space, and the latest gadgets. Drawing on my extensive experience working at tech giants like Google and Qualcomm, I bring a unique perspective to my coverage. My portfolio combines critical analysis and infectious enthusiasm to keep tech enthusiasts informed and excited about the future of technology innovation.
GTC 2025 Inside Boston Dynamics Humanoid Robotic Breakthroughs
AI Summary
Boston Dynamics has made significant breakthroughs in humanoid robots, enabling them to adapt to complex environments and tasks. The company's work focuses on mobile manipulation capabilities, with robots able to interact with their surroundings in meaningful ways. Recent advancements include improved perception systems that allow robots to recognize objects like cables and glass walls, and the development of large behavior models that can map directly from pixel inputs to robot actions, enabling more generalized robot behaviors.
March 25 2025 19:13
At GTC 2025, Aaron Saunders, CTO of Boston Dynamics, delivered an insightful presentation that showcased the company's groundbreaking work in creating robots that not only mimic human movement but are increasingly capable of adapting to complex environments and tasks.
According to Saunders, we've entered an era where robotics progress is "no longer linear." The convergence of AI, advanced simulation tools, and improved hardware has created a perfect storm for advancement. "This is an exciting time to be in robotics," he emphasized, noting that the rate of innovation is accelerating dramatically.
The next frontier of productivity, as Saunders sees it, is mobile manipulation – robots that can not only move through spaces but also interact with their environments in meaningful ways. This capability is crucial for the practical deployment of robots in real-world settings.
One of the most striking demonstrations was a robot performing part sequencing in an automotive setting. This complex job involves taking engine covers from multiple containers and placing them in a specific sequence in a cart for assembly workers. What makes this task particularly challenging is that the robot must handle matte black objects (notoriously difficult for vision systems), reach into loose pockets, and manipulate thin objects with precision.
From Specialized Tasks to General Purpose Robots
Boston Dynamics showcased their robots performing specific industrial tasks like part sequencing in automotive manufacturing. This job requires robots to select different engine covers from various containers and sequence them correctly for assembly line workers – a task requiring precision, adaptability, and reliable vision systems.
While impressive, Saunders acknowledged that these specialized capabilities are just stepping stones toward the ultimate goal: general purpose robots that can handle virtually any task in any environment. "It's far from the robot that could go into your home and solve any problem, pick up your kid's Lego, shovel your walk," he noted, highlighting the ambitious vision driving their research.
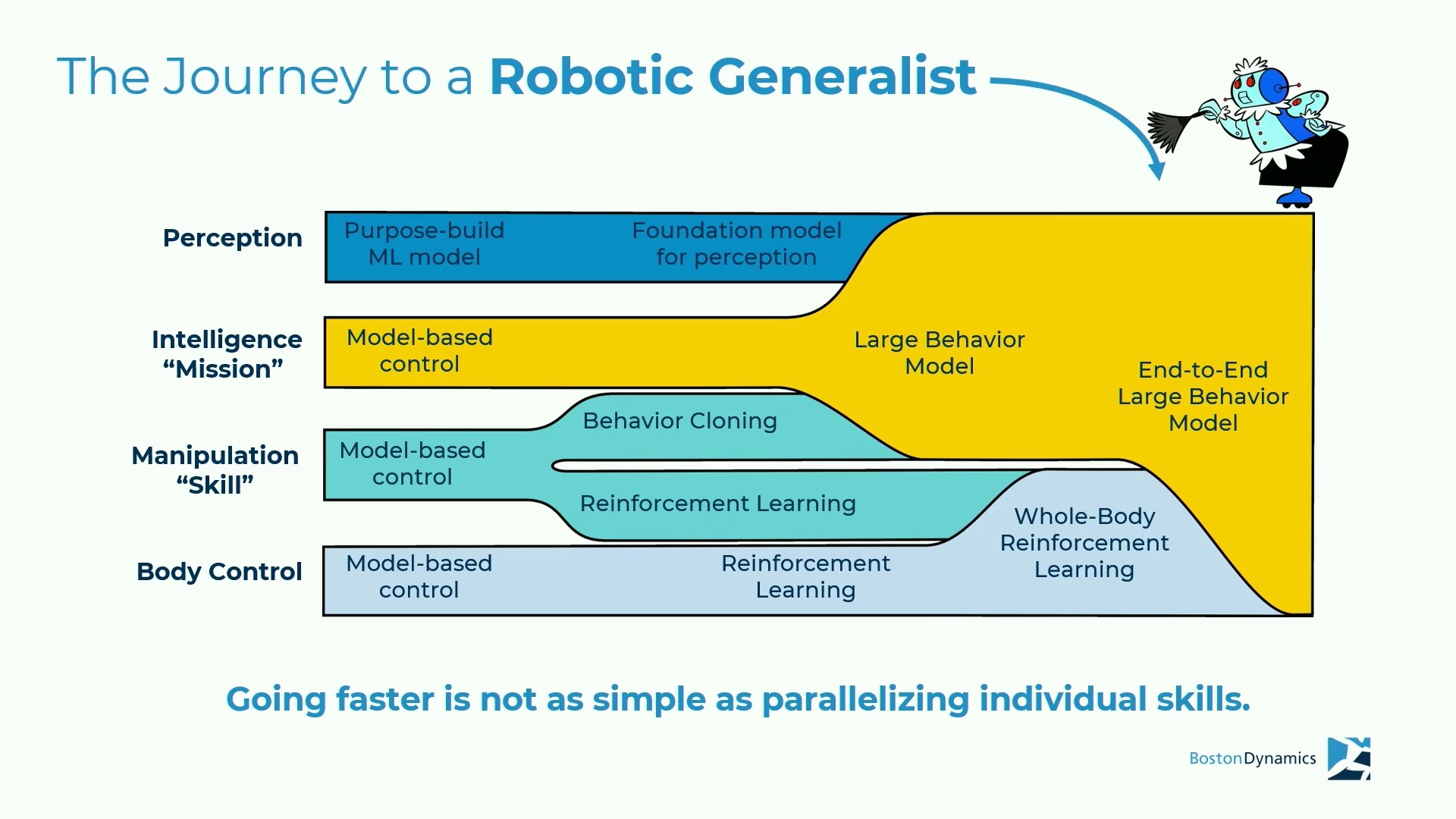
The architecture of robot control systems can be broken down into four key categories:
Perception - How robots understand the world around them
Intelligence/Mission - Planning what tasks to perform and when
Manipulation Skills - Hand and arm coordination for interacting with objects
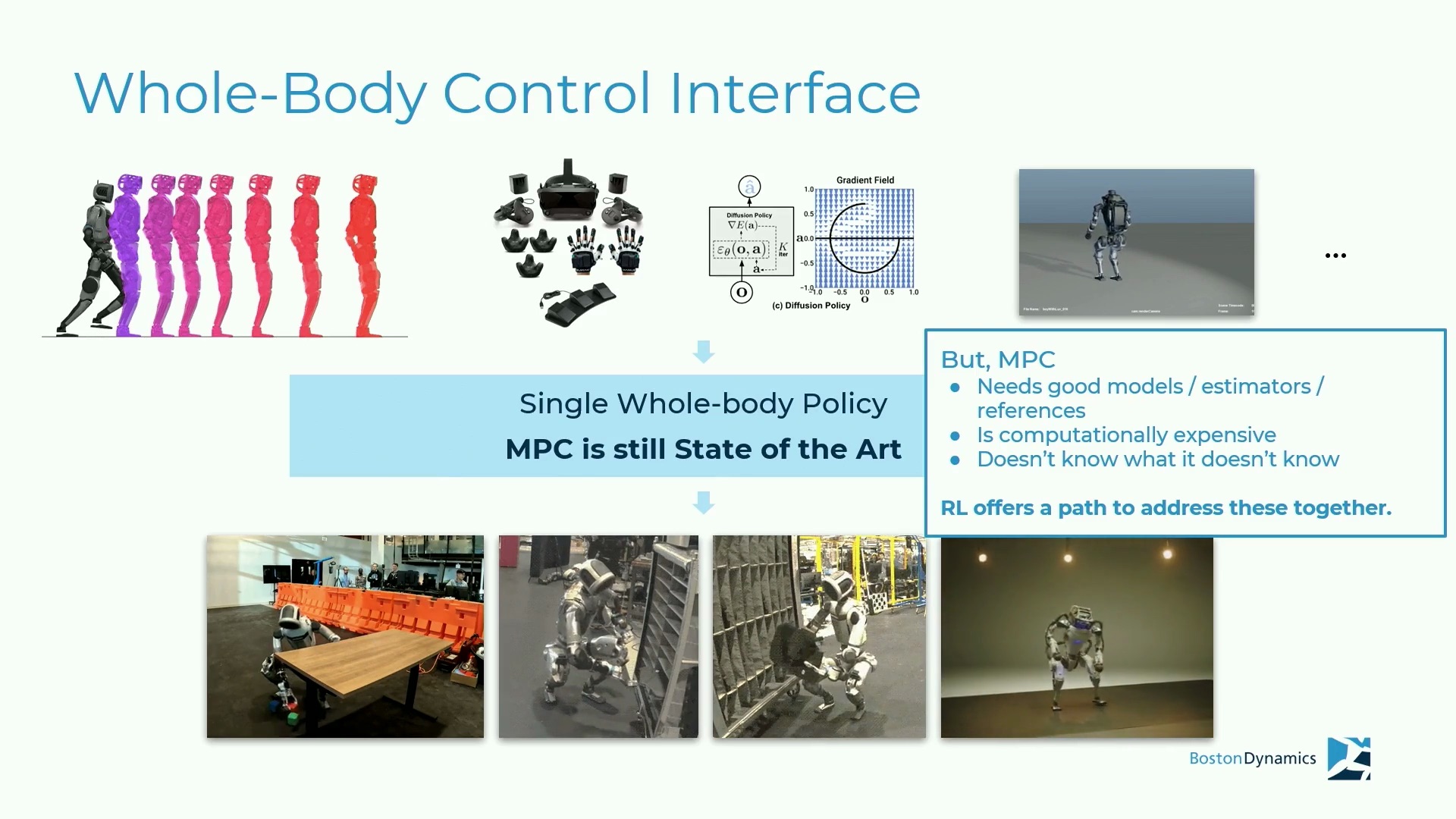
Whole Body Control - Coordinating the entire robot for movement and balance
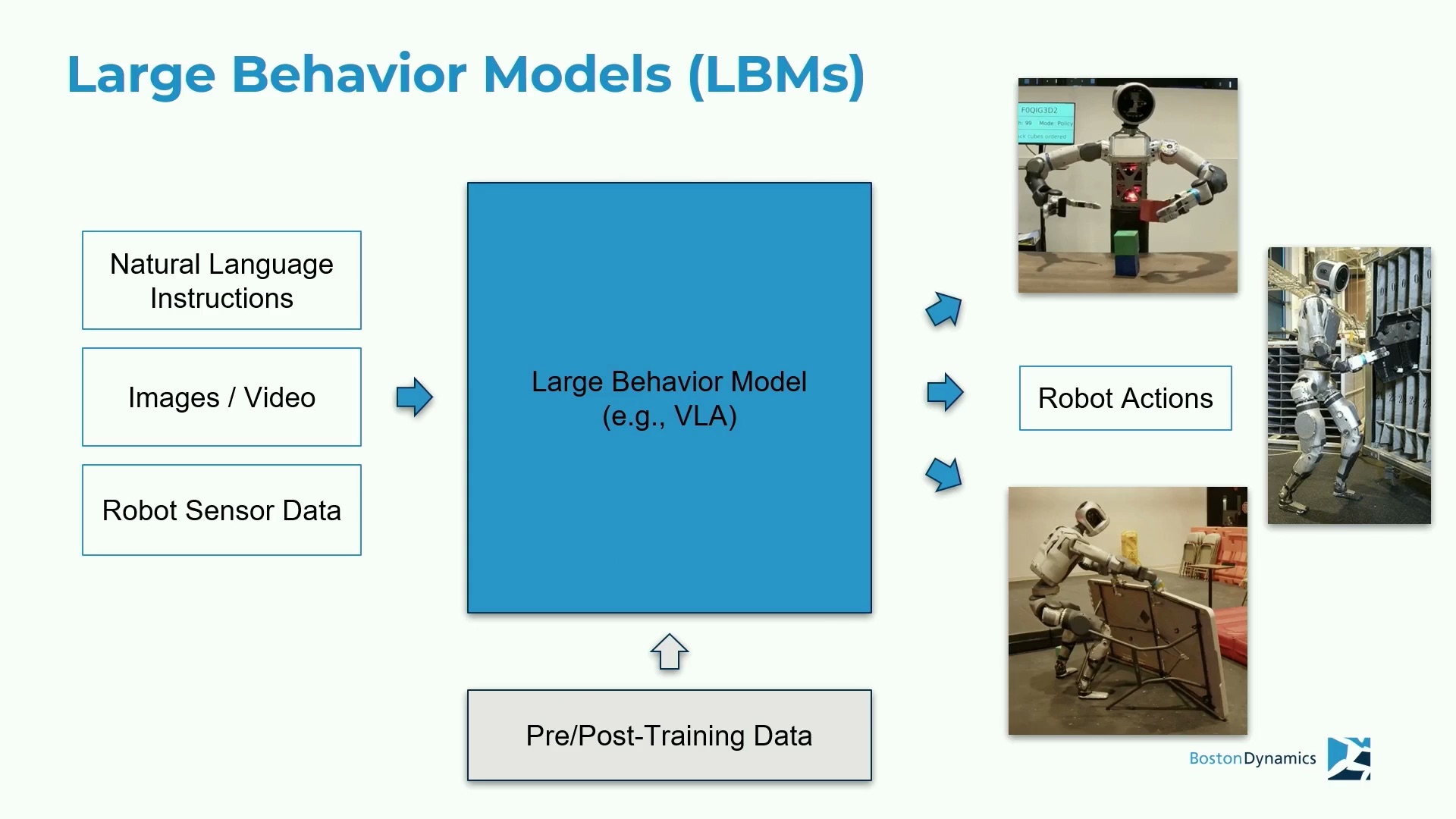
The current state-of-the-art in deployed robots still relies heavily on model-based control, but Saunders believes this is rapidly changing. The industry is moving toward what he describes as "large end-to-end behavior models" – AI systems that can understand the physics of the real world and process multiple input types to generate appropriate robot actions.
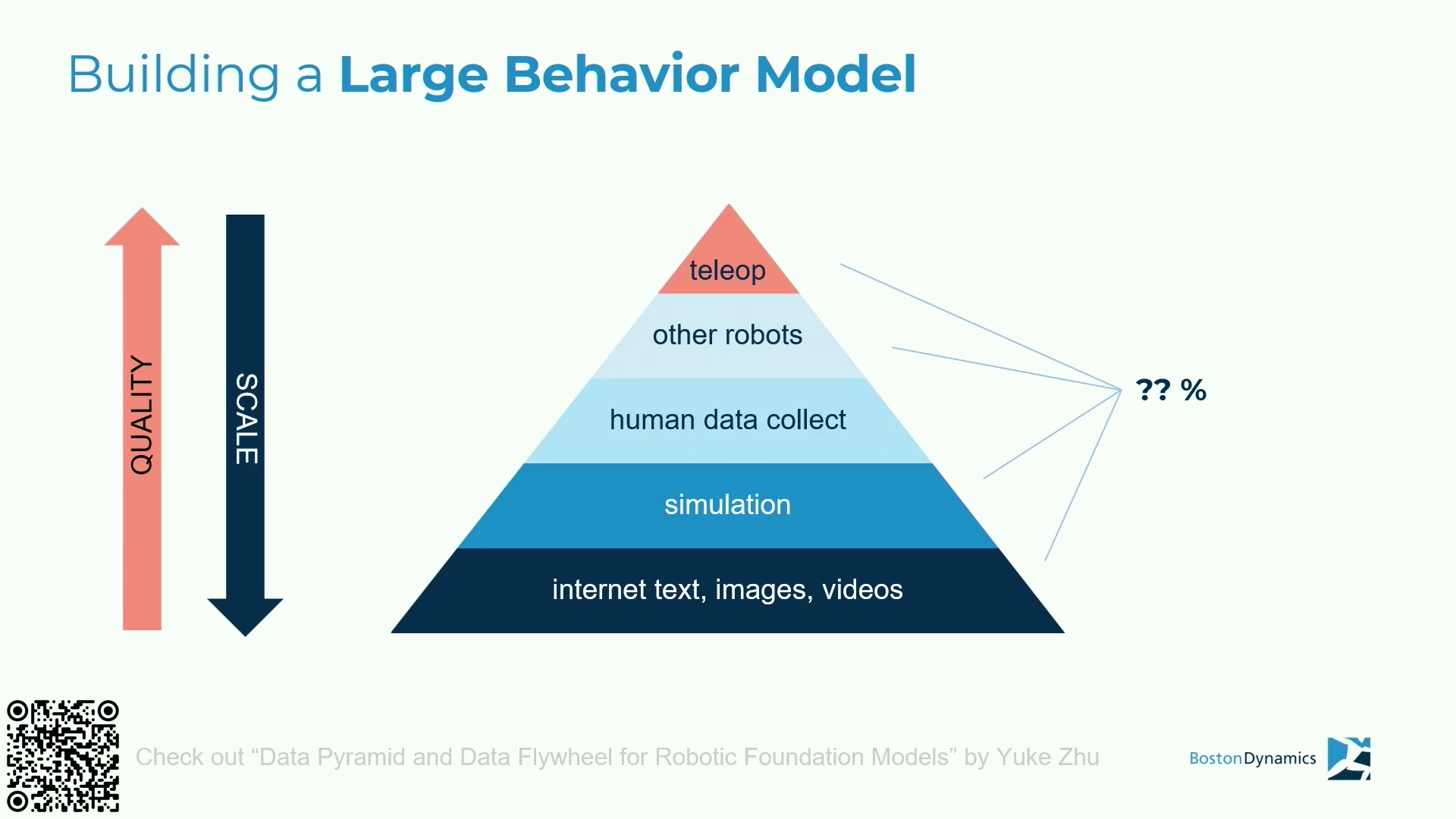
Building the Data Pyramid: Training AI for Robotics
Saunders explained the data pyramid and data flywheel concept for training these large behavior models and he presented a hierarchy of data sources:
Internet Data (Bottom of Pyramid): Massive scale but low quality for robotics purposes
Simulation Data: High-fidelity physics simulations generating training examples
Robot Data Sets: Information gathered from existing robots in the field
Human Demonstrations: Motion capture and other ways of learning from human actions
Teleoperation (Top of Pyramid): Humans directly controlling robots to demonstrate tasks
Each layer represents a different approach to gathering the data needed to train advanced AI models for robot control. Saunders noted that while teleoperation provides the highest quality data, scaling it presents significant challenges. Conversely, internet data is abundant but often lacks the specific context needed for robotics.
Perception Breakthroughs: Seeing the World Like Humans
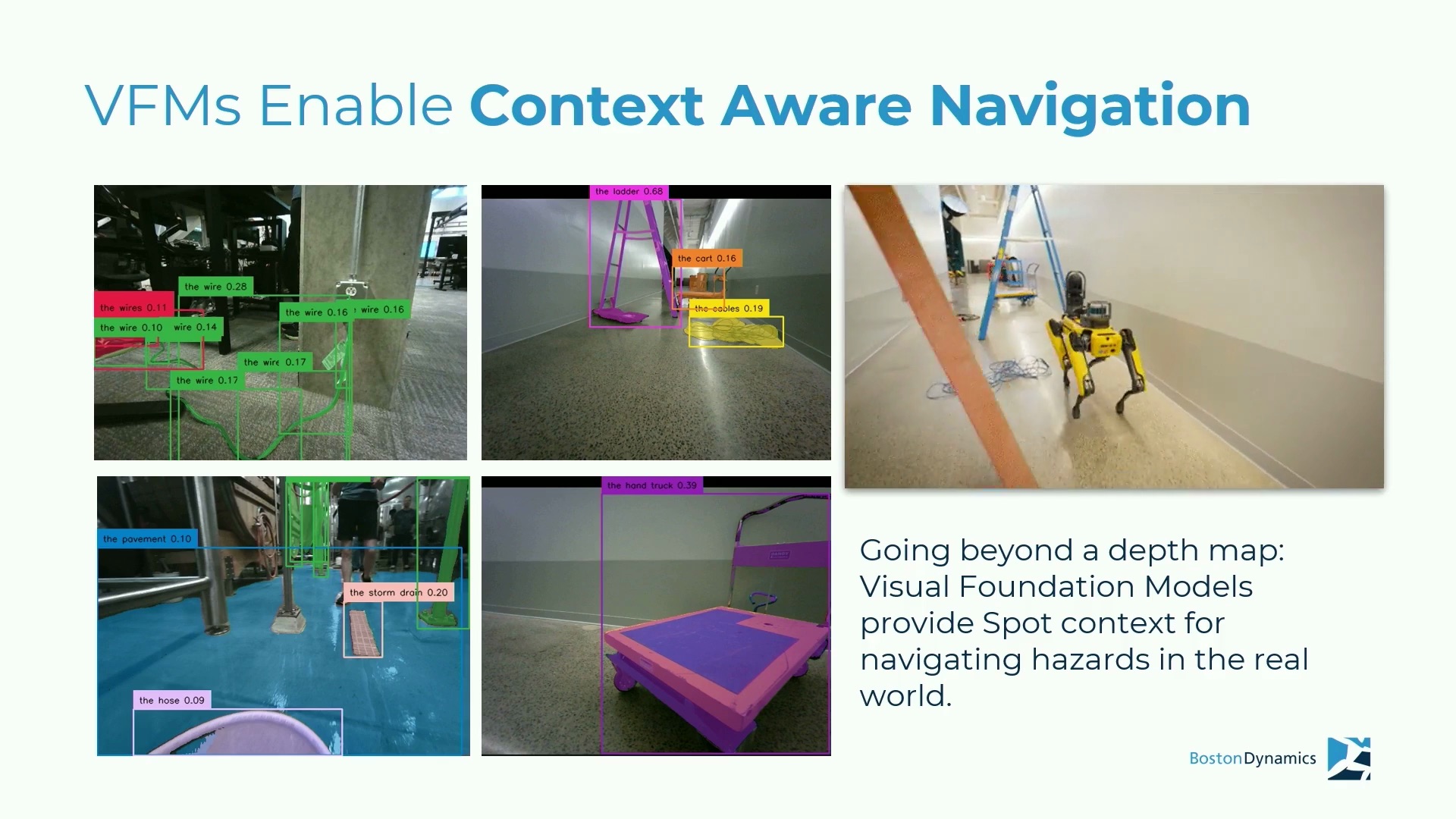
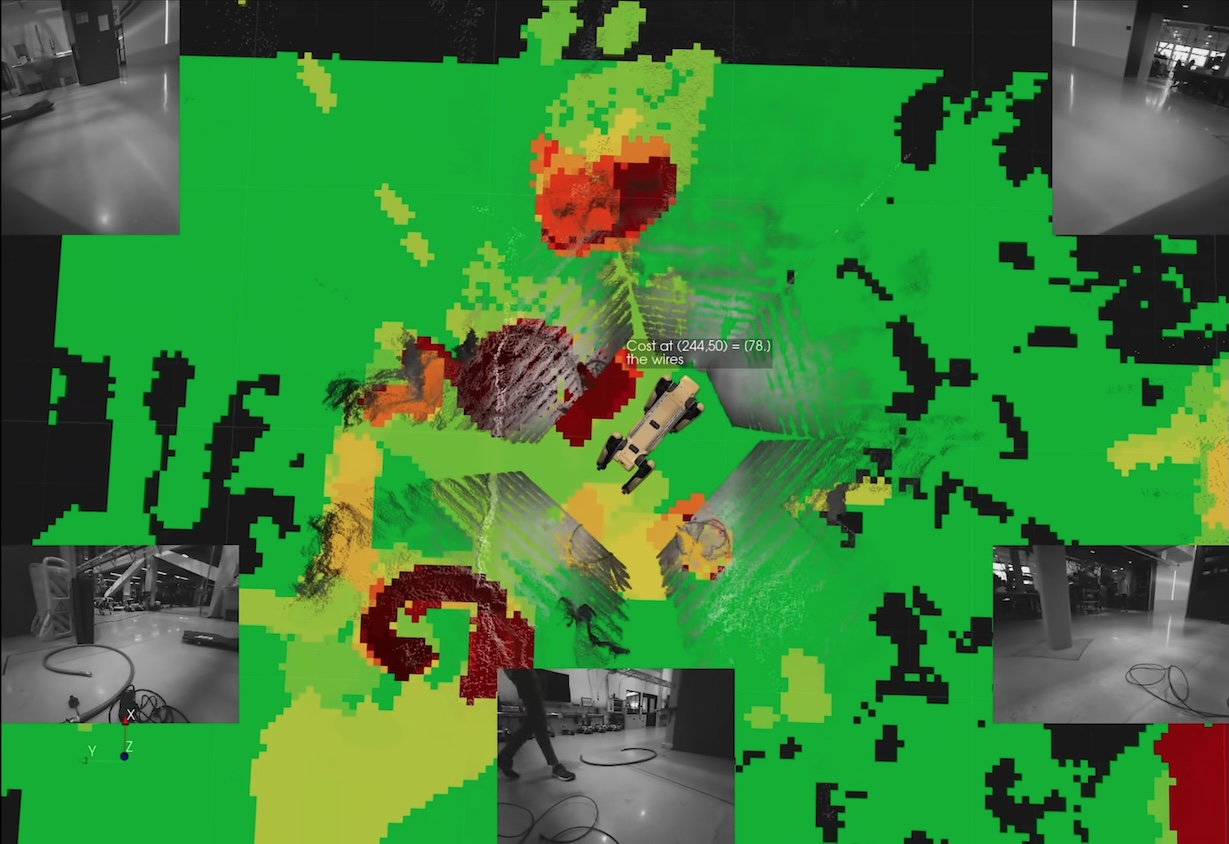
Recent advances in perception have dramatically improved how robots understand their environments. Saunders shared examples of their robot "Spot" navigating complex environments using foundation models that provide richer semantic understanding.
"Prior to this foundation model being accessible, the robot really thought about the world as things it could step on or things it couldn't step on," he explained. With AI-enhanced perception, robots can now recognize objects like cables, glass walls, and storm drains – obstacles that were previously challenging to detect with traditional sensors.
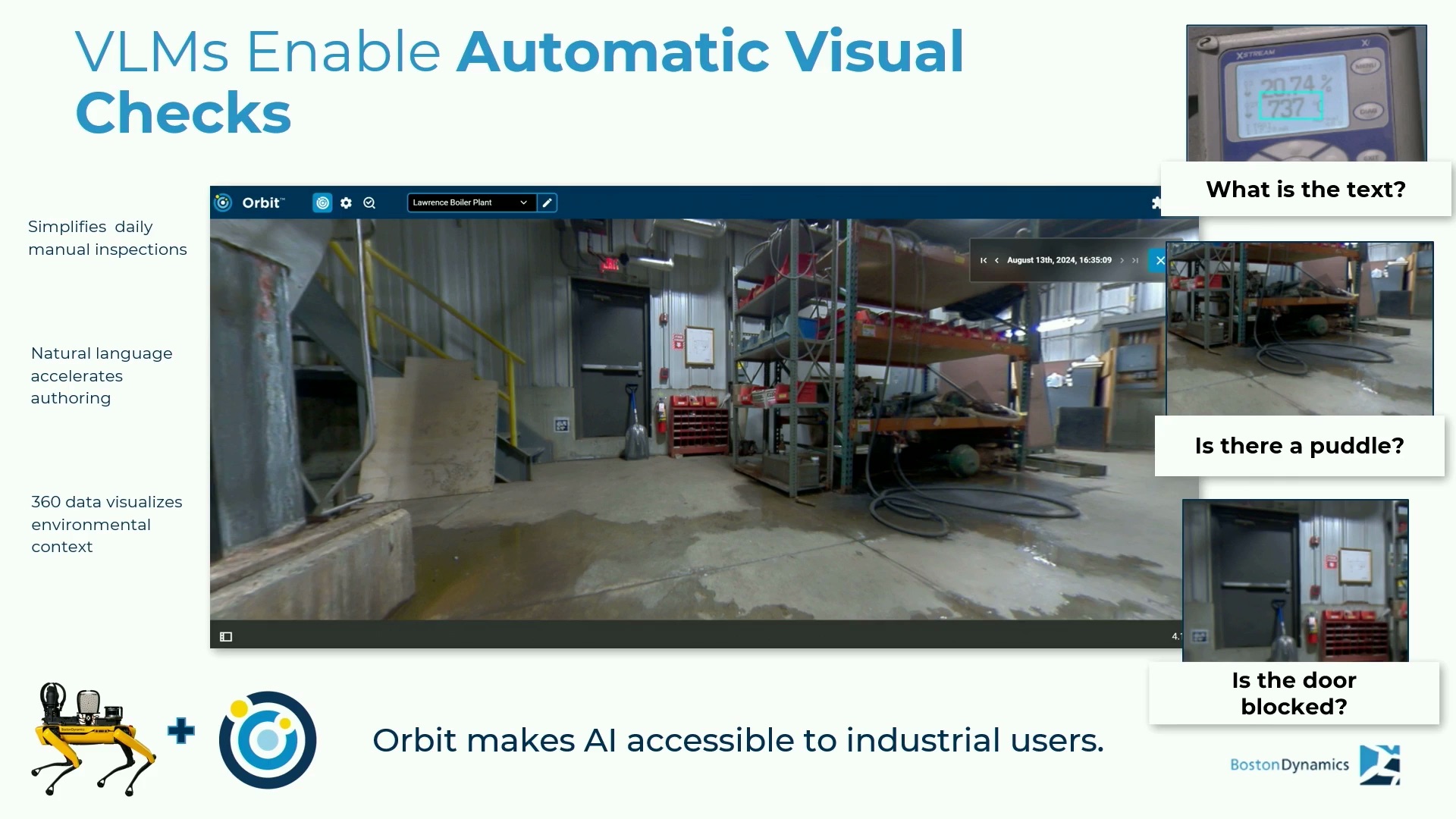
This improved perception isn't just about avoiding obstacles; it's enabling natural language interfaces that allow users to query robot-collected data. For example, security personnel can ask if a patrolling robot has encountered "any puddles" or "blocked doors" during its rounds.
Whole Body Control: Learning Human-Like Movement
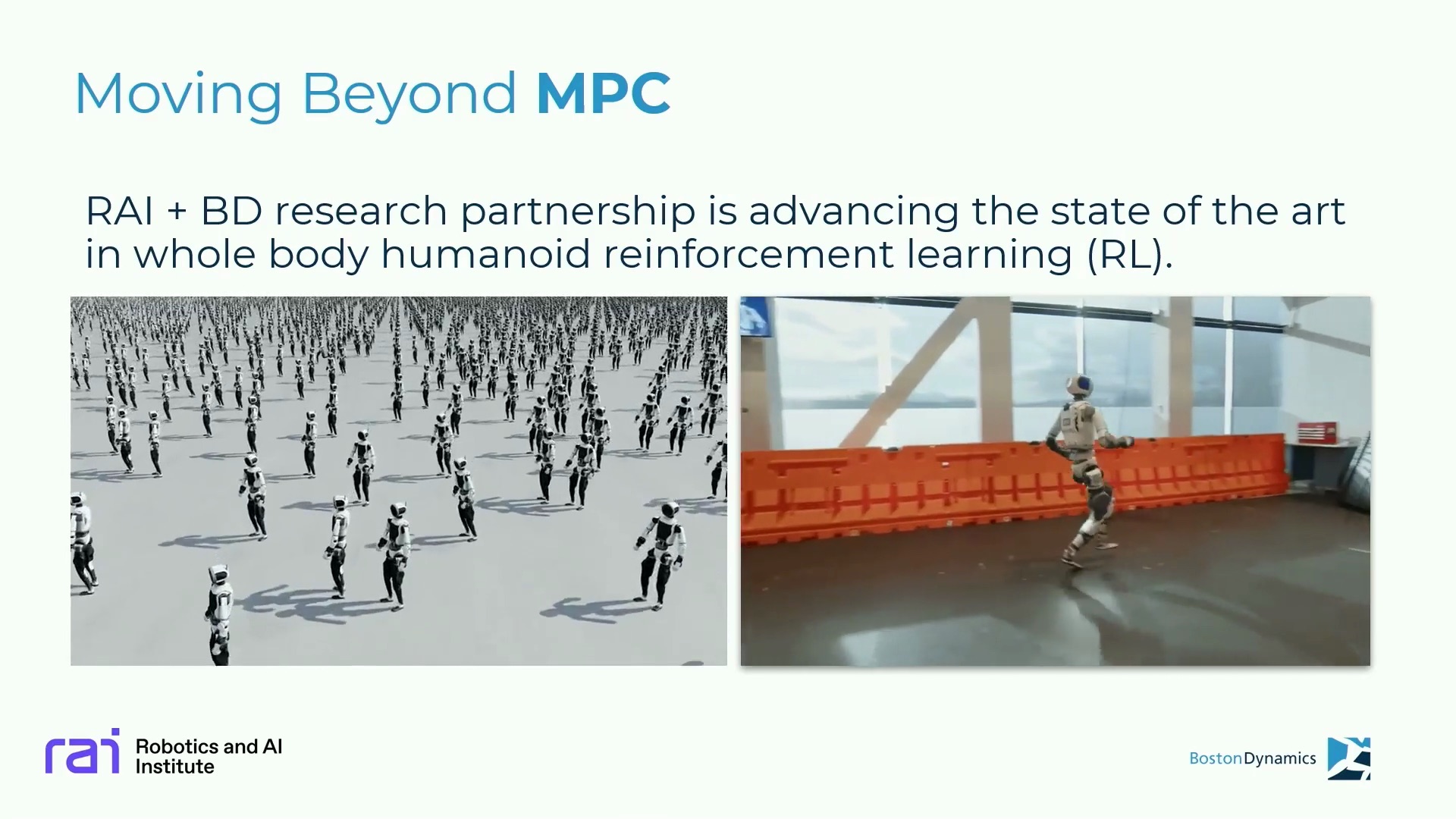
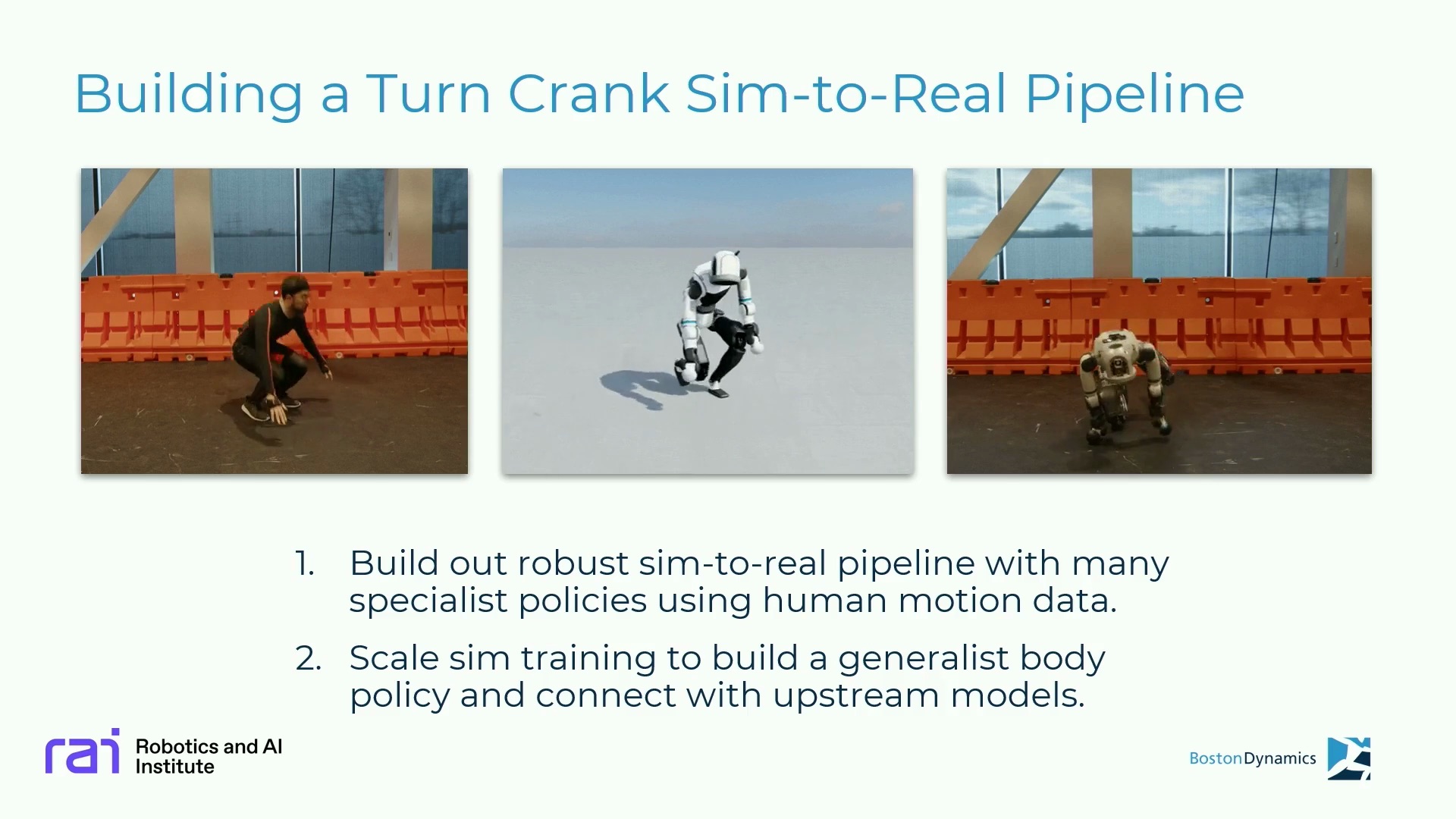
One of the most impressive demonstrations showcased Boston Dynamics' work with Ray (their sister company) on developing human-like movement for their Atlas robot. Using motion capture of human performers, reinforcement learning, and advanced simulation, they've created a pipeline that can translate human movements into robot behaviors with remarkable fidelity.
The results are stunning – Atlas performing cartwheels, dynamic running with natural arm swings, and other athletic moves that capture the nuanced mechanics of human motion. What makes this approach particularly powerful is how quickly they can go from capturing human movement to implementing it on the robot – often in "a single shot with no adjustments."
"This is probably my favorite motion I've ever seen in the last 20 years working in robotics," Saunders remarked about Atlas' running capabilities, which incorporate natural elements like leaning forward and arm swinging that are difficult to program manually.
Manipulation Skills: Teaching Robots to Grasp
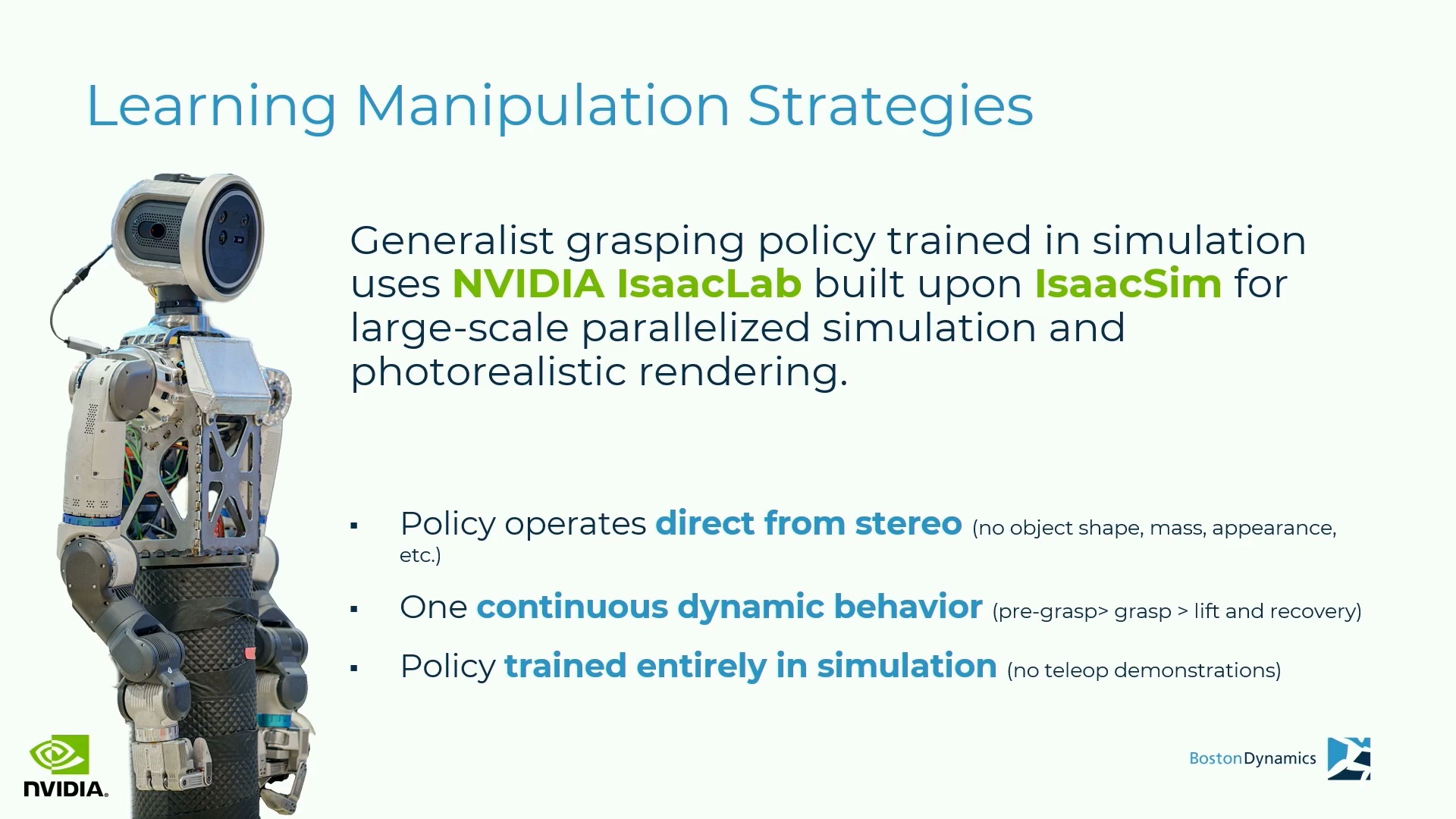
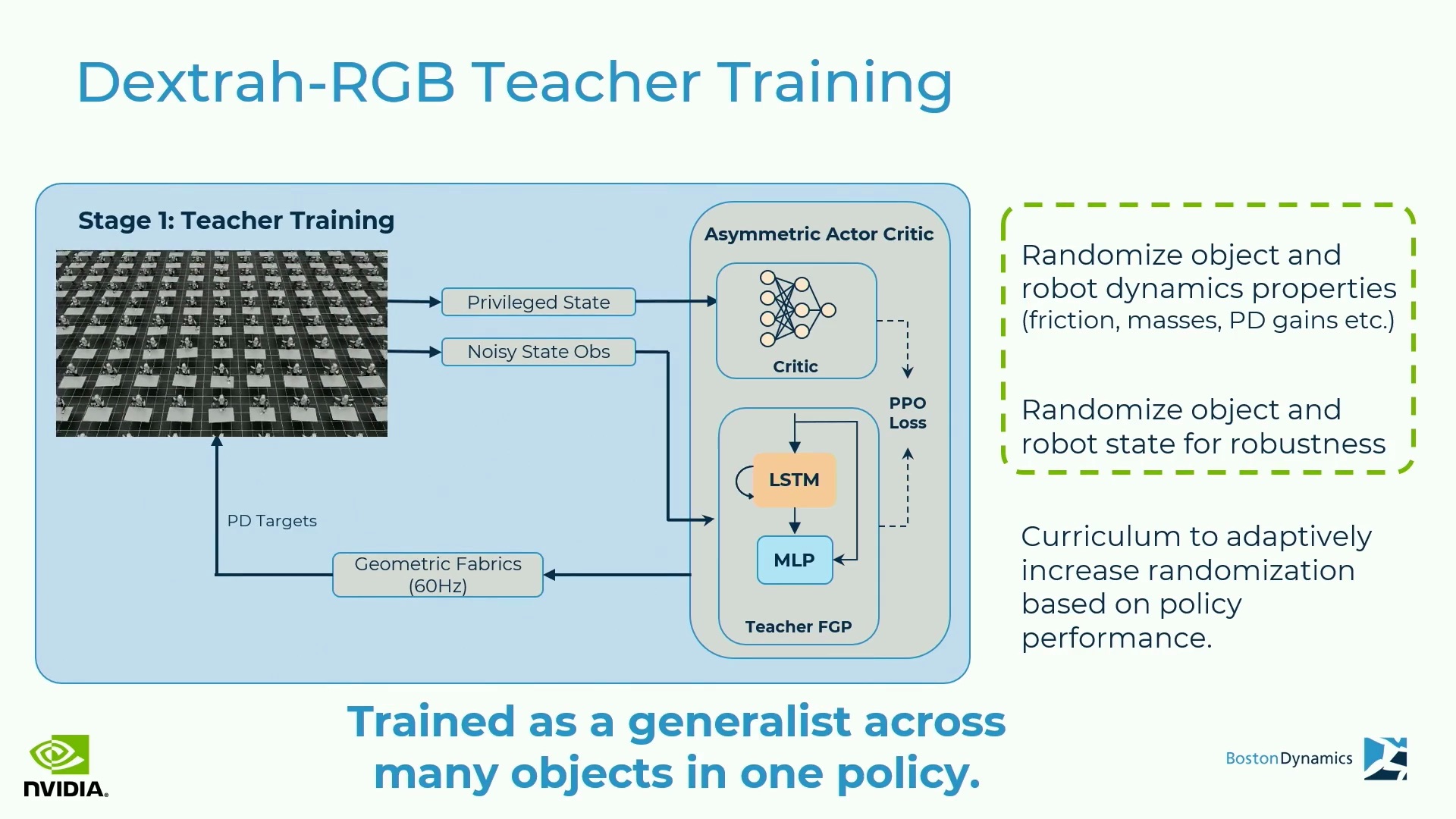
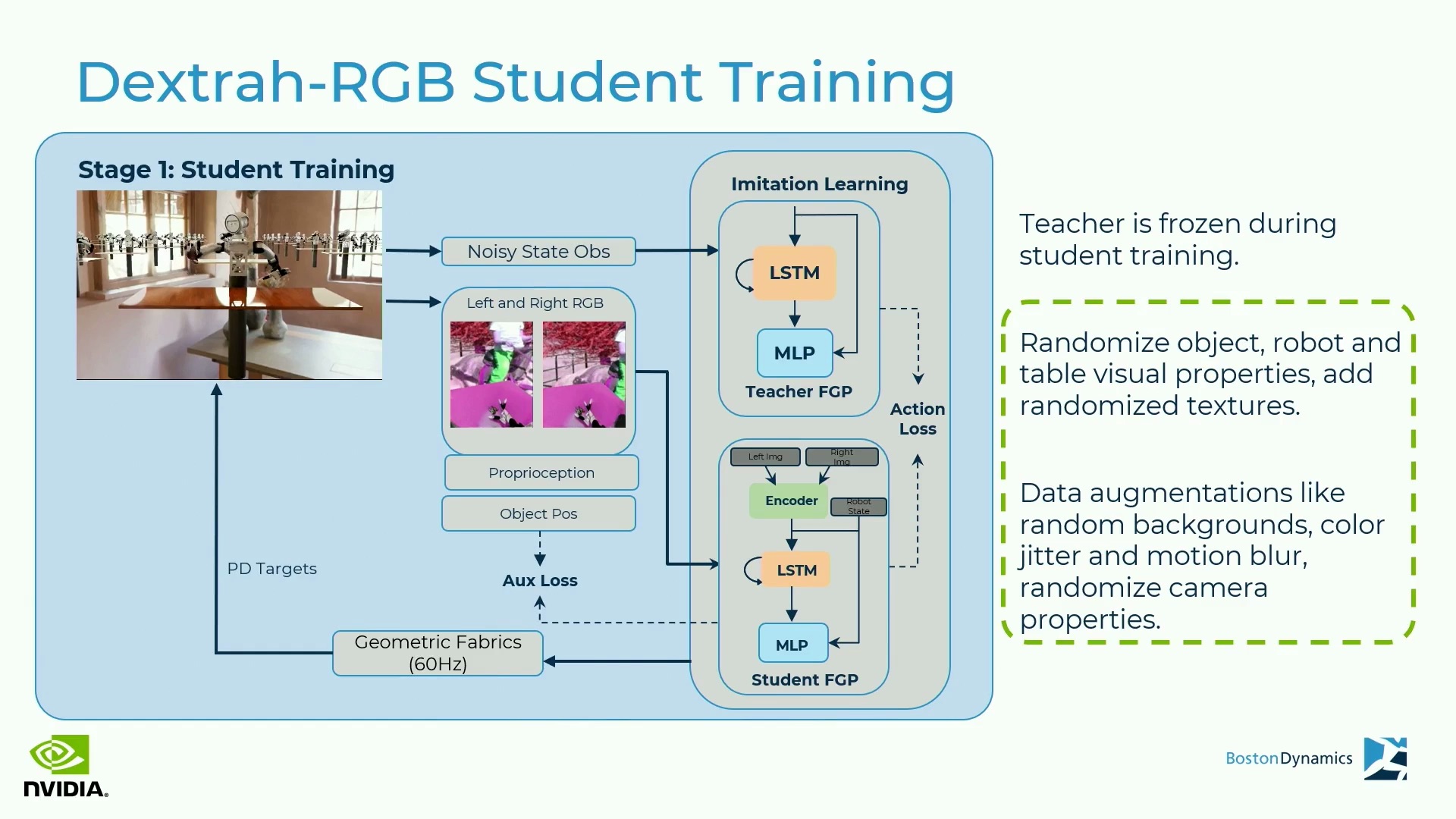
Beyond whole-body movement, Boston Dynamics has made significant progress in manipulation skills – teaching robots to grasp and handle objects. Saunders showcased a policy trained entirely in simulation that enables their robot to grasp diverse objects without prior knowledge of their shapes, masses, or appearances.
The robot demonstrated remarkable adaptability, using different grasp strategies based on visual assessment of objects – from fingertip grips for small items to enveloping grasps for larger ones. It could even recognize when a grasp was unsuccessful and try again with a different approach.
This work represents a shift away from relying solely on teleoperator demonstrations, showing that reinforcement learning in simulation can produce highly capable manipulation skills that transfer well to the real world.
Large Behavior Models: The Path to General Intelligence
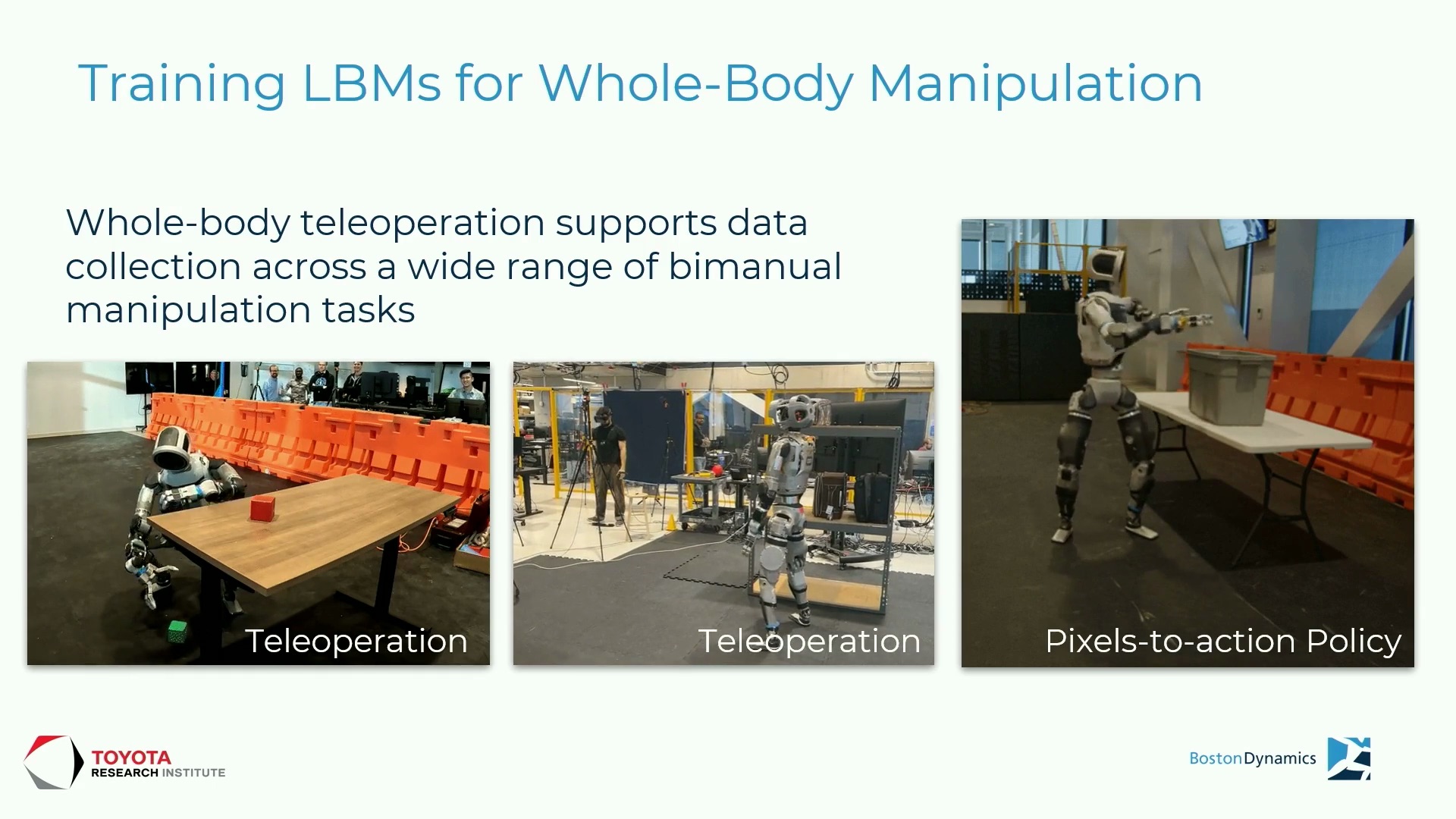
Looking toward the future, Saunders discussed Boston Dynamics' work with Toyota Research Institute on helping robots to adapt to different environments and tasks. While Boston Dynamics brings the hardware to the partnership, Toyota Research Institute contributes cutting-edge AI expertise, particularly in the area of Large Behavior Models.
TRI has been at the forefront of applying generative AI techniques to robotics, pioneering work in diffusion policy that has significantly advanced dexterous manipulation capabilities. TRI's research focuses include:
Developing multi-task, vision-and-language-conditioned foundation models
Advancing dexterous manipulation through AI
Creating open-source robot AI models and datasets
Leveraging computer vision and large-language model training
"I think we're going to see all of this stuff together in a pretty exciting way," Saunders predicted, suggesting that different approaches will converge to create increasingly capable robots. While still early in development, these models represent a significant step toward the generalist robots that have long been the industry's goal.
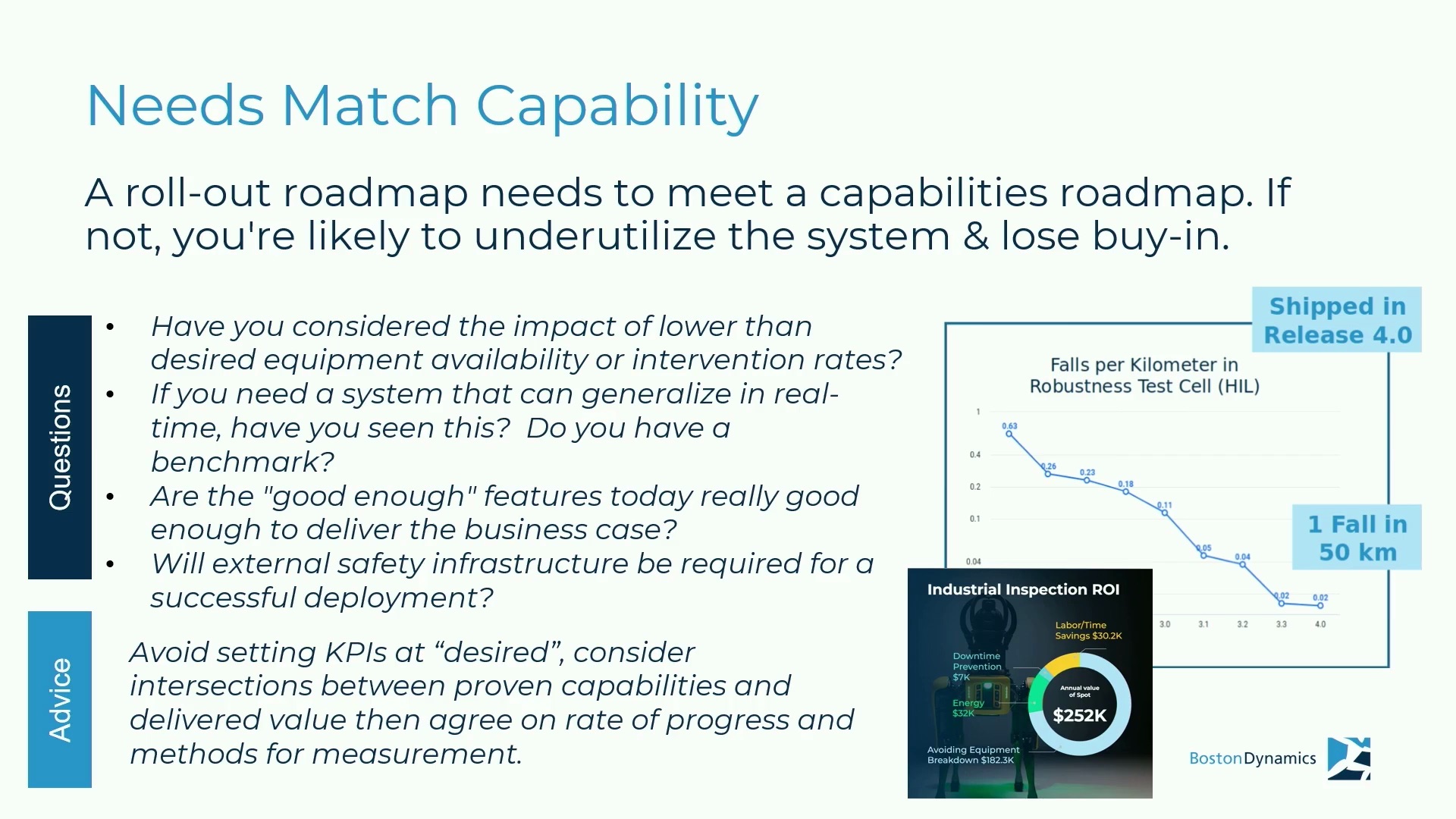
For businesses considering adopting humanoid robots, Saunders offered valuable advice on implementation:
Align expectations with capabilities: Understand that robot capabilities will evolve over time and plan accordingly.
Consider equipment availability: Be prepared for less-than-perfect uptime, especially in early deployments.
Test generalization: Assess whether a robot can handle variations of tasks or only the specific scenarios it was trained for.
Prioritize safety from the start: "You can't add safety later," Saunders emphasized, noting the importance of building safety considerations into deployment plans from the beginning.
Set realistic KPIs: Track progress transparently and be honest about where improvements are needed.
He illustrated how Boston Dynamics' earlier robot, Spot, gradually improved its reliability over time – going from frequent falls to less than one fall per 50 kilometers in recent versions. This improvement trajectory is typical for robotic systems and highlights the importance of patience and persistence when implementing new technologies.
Creative Applications: Beyond Industrial Use
The presentation concluded with an interesting example of how these robots can be used in creative fields. Boston Dynamics partnered with WPP to use their robots for filmmaking and content creation, demonstrating how Atlas can function as a mobile camera platform capable of accessing locations that would be difficult for traditional equipment.
The partnership between Boston Dynamics and TRI reflects a growing trend toward collaboration between hardware and software specialists in the robotics industry. As robots become more complex, no single organization can excel at every aspect of their development. By combining their expertise, these companies can accelerate progress and overcome challenges that would be difficult to tackle alone.
This partnership highlights the importance of open research and knowledge sharing in advancing the field. TRI has played a leading role in developing open-source robot AI models and datasets, and this collaborative approach will likely continue to benefit the broader robotics community.
The Road Ahead: Challenges and Opportunities
While Boston Dynamics has made remarkable progress, Saunders acknowledged that bringing humanoid robots into everyday environments remains challenging. When asked about the timeline for home robots, he suggested they're still "a decade away" – primarily due to safety considerations and the complexity of operating in unpredictable environments.
The company is taking a measured approach to deployment, focusing first on controlled industrial settings before moving to more public environments. This strategy allows them to build robust safety systems and ensure their robots are reliable before tackling the greater uncertainties of home or public use.
Boston Dynamics' work represents the exciting convergence of AI, simulation, robotics hardware, and control systems. As Aaron Saunders put it, "all the tools that are coming together at the right time, all the people that are coming at the right time" are creating unprecedented opportunities for advancement.