geeky NEWS: Navigating the New Age of Cutting-Edge Technology in AI, Robotics, Space, and the latest tech Gadgets
As a passionate tech blogger and vlogger, I specialize in four exciting areas: AI, robotics, space, and the latest gadgets. Drawing on my extensive experience working at tech giants like Google and Qualcomm, I bring a unique perspective to my coverage. My portfolio combines critical analysis and infectious enthusiasm to keep tech enthusiasts informed and excited about the future of technology innovation.
Northwestern Center for Robotics DexNex: A Testbed for Dexterous Manipulation
AI Summary
DexNex, a teleoperation testbed developed by Northwestern University's Center for Robotics and Biosystems, enables human-like interaction with robots through near 1-to-1 motion mapping between operator movements and avatar actions, providing haptic feedback and reducing latency for more precise control.
June 09 2024 02:23
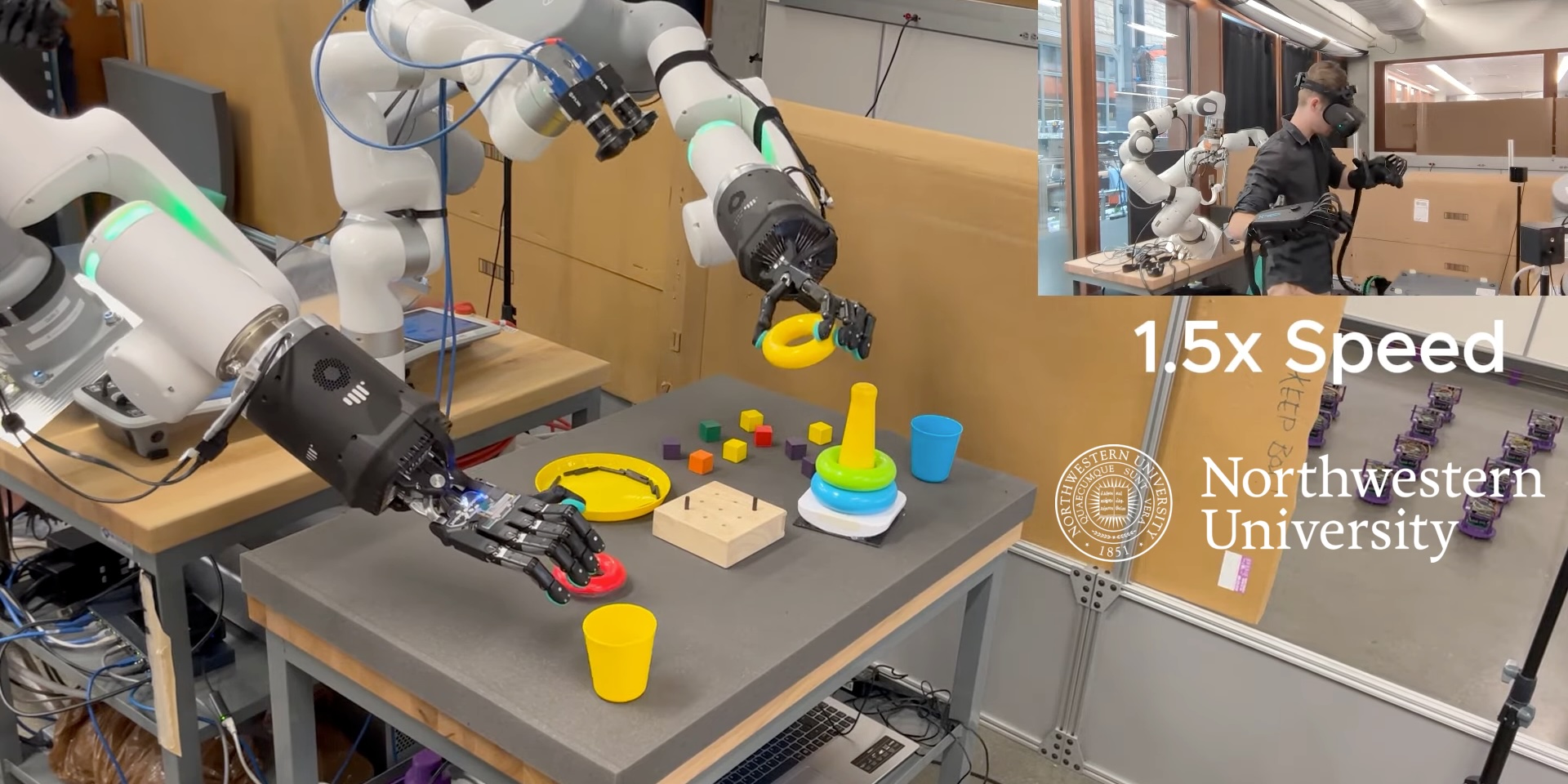
In the realm of robotics and biosystems, the Center for Robotics and Biosystems at Northwestern University has unveiled a revolutionary anthropomorphic teleoperation testbed named DexNex (v0, June 2024). This cutting-edge technology aims to bridge the gap between human and robot interaction by recreating human upper-limb functionality through a near 1-to-1 mapping between Operator movements and Avatar actions.
How DexNex Works
DexNex operates by seamlessly integrating the Operator's movements with the Avatar's actions. The system captures and transmits the motion of the Operator's arms, hands, fingers, and head to the Avatar in real-time. This allows the Avatar to mimic the Operator's actions with incredible precision and accuracy.
In addition to the forward feed of motion, DexNex also provides haptic feedback to the Operator. Fingertip pressures, finger forces, and camera images are fed back to the Operator, creating an immersive experience that closely resembles real-world interaction. This bidirectional communication between the Operator and the Avatar is crucial for achieving dexterous manipulation tasks.
Minimizing Latency for Seamless User Experience
One of the key challenges in teleoperation systems is latency, which can cause a noticeable delay between the Operator's actions and the Avatar's response. DexNex addresses this issue by minimizing the latency of each subsystem, ensuring a seamless, immersive, and responsive user experience.
By reducing latency, DexNex enables the Operator to perform tasks with greater precision and efficiency. This is particularly important in applications where real-time interaction and quick response times are critical, such as remote surgery, hazardous material handling, or space exploration.
Future Research and Applications
The development of DexNex opens up a wide range of possibilities for future research and applications. One area of focus is gaining a better understanding of the criticality of haptic and vision feedback for different manipulation tasks. By studying how these feedback mechanisms affect performance and user experience, researchers can optimize the system for specific applications.
Another avenue for future research is providing arm-level grounded force feedback. This would allow the Operator to experience the forces and resistance encountered by the Avatar's arms, further enhancing the immersive experience and enabling more precise control.
Additionally, the use of machine learning techniques to transfer dexterous skills from the human Operator to the robot Avatar is an exciting prospect. By learning from human demonstrations, the Avatar could potentially acquire complex manipulation skills and perform tasks autonomously, reducing the need for constant human intervention.
Potential Impact and Conclusion
DexNex represents a significant milestone in the field of robotics and biosystems. By enabling dexterous manipulation through anthropomorphic teleoperation, this technology has the potential to revolutionize various industries, from healthcare and manufacturing to space exploration and beyond.
As research continues and the system is refined, DexNex could pave the way for more advanced human-robot collaboration, allowing humans to perform tasks remotely with unprecedented levels of precision and control. The possibilities are endless, and the impact of this groundbreaking technology is sure to be felt across multiple domains in the years to come.