geeky NEWS: Navigating the New Age of Cutting-Edge Technology in AI, Robotics, Space, and the latest tech Gadgets
As a passionate tech blogger and vlogger, I specialize in four exciting areas: AI, robotics, space, and the latest gadgets. Drawing on my extensive experience working at tech giants like Google and Qualcomm, I bring a unique perspective to my coverage. My portfolio combines critical analysis and infectious enthusiasm to keep tech enthusiasts informed and excited about the future of technology innovation.
UC Berkeley Peter Abbeel's Vision for AI-Powered Humanoid Robots
AI Summary
Peter Abbeel, a UC Berkeley professor and robotics pioneer, presented his vision for AI-powered humanoid robots at NVIDIA's GTC conference, highlighting the progress made in creating platforms that can walk, run, and manipulate objects with increasing sophistication. However, Abbeel notes that creating effective AI systems to control these complex machines is a significant challenge, particularly collecting sufficient data on humanoids, which has led to various approaches, including teleoperation, simulation, and reinforcement learning, with the goal of unlocking human-level capabilities in robots.
March 24 2025 08:31
In a recent presentation at NVIDIA's GTC conference, UC Berkeley professor and robotics pioneer Peter Abbeel offered a fascinating glimpse into the future of humanoid robots. With hardware advancements accelerating and AI capabilities expanding, we're on the cusp of a robotics revolution that could transform how machines interact with our world. Let's dive into Abbeel's insights and discover what's happening at the frontier of humanoid robotics.
The Hardware-Software Convergence
For decades, science fiction has promised us humanoid robots capable of navigating our world with human-like dexterity and intelligence. According to Peter Abbeel, we're finally at a "unique time in humanoid robotics" where the hardware is catching up to our ambitions. Companies like Tesla, Unitree, and even academic labs at Berkeley are rapidly iterating on humanoid designs, creating platforms that can walk, run, and manipulate objects with increasing sophistication.
But as Abbeel points out, there's a critical piece missing: the brain. While the mechanical bodies of robots improve dramatically, we're still figuring out how to create the AI systems that can control these complex machines effectively. This challenge sits at the intersection of cutting-edge AI research and robotics engineering, representing one of the most exciting frontiers in technology today.
The Data Dilemma: Why Humanoid Robots Aren't Like ChatGPT
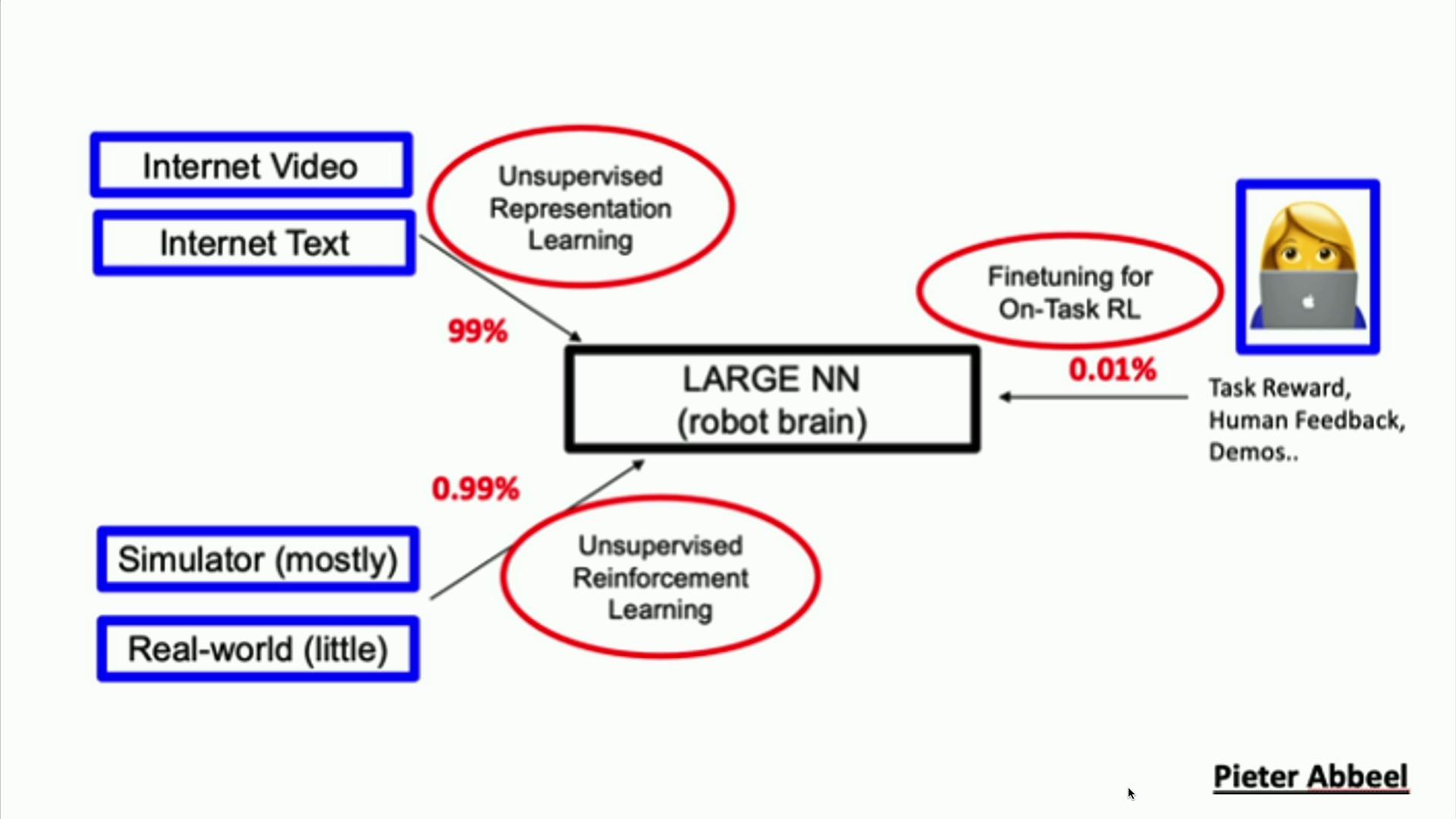
When ChatGPT burst onto the scene in late 2022, it demonstrated how powerful large language models (LLMs) could become when trained on vast amounts of text data. The recipe was clear: collect enormous quantities of text from the internet, train a large transformer model to predict the next word, and fine-tune with human feedback.
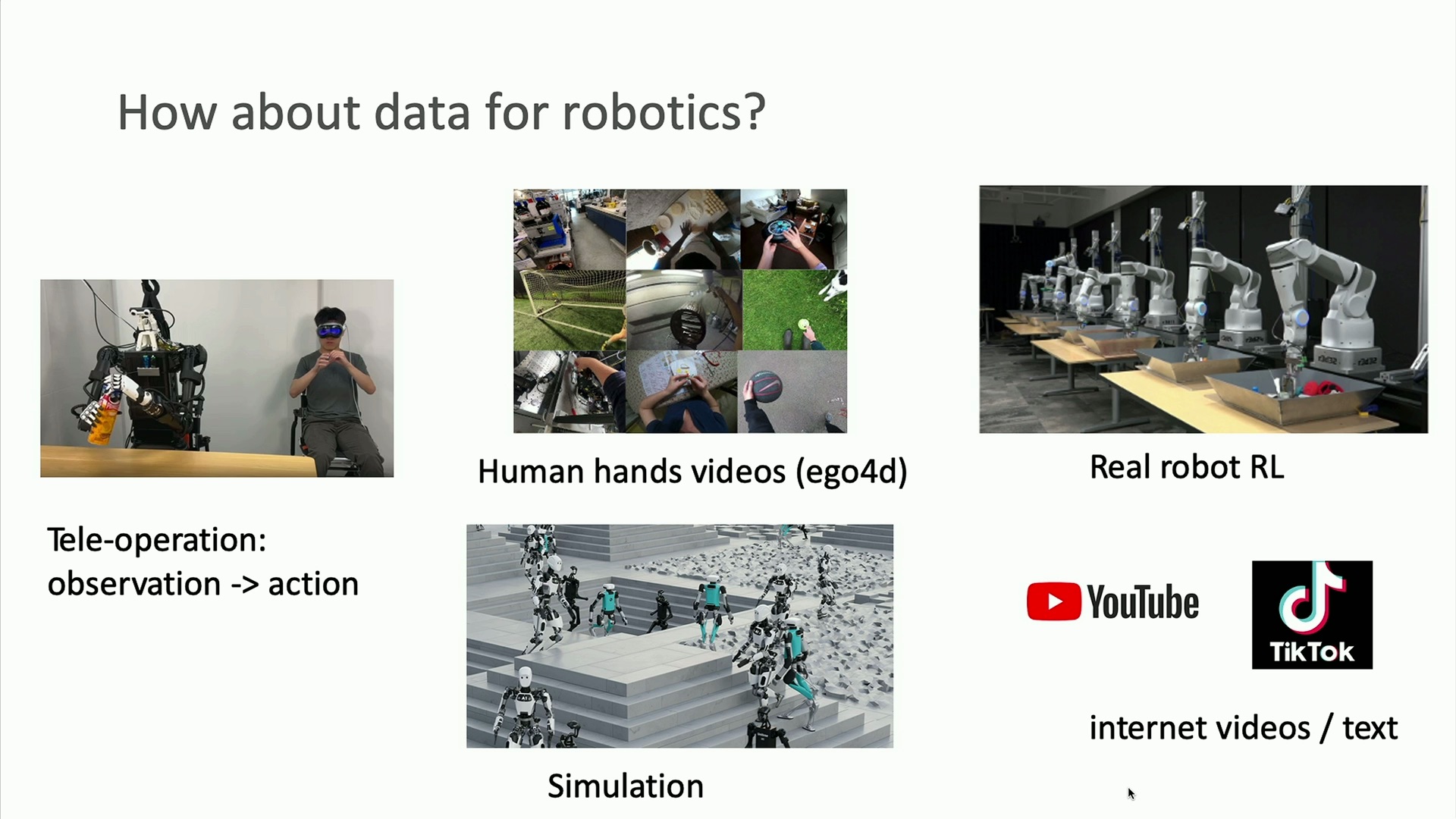
Humanoid robots, however, face a fundamentally different challenge. As Abbeel explains, "Where is our humanoid robot data? There are no humanoids in the world. So there is no data of humanoids doing things." This data scarcity creates several potential approaches, each with its own limitations:
Teleoperation: Having humans directly control robots to generate data, but this is time-consuming and costly
Human hand tracking: Using computer vision to track human hands in videos, but this doesn't capture exact robot movements
Simulation: Creating virtual environments for robots to learn in, but these don't always match reality
Real-world reinforcement learning: Letting robots learn through trial and error, but this raises safety concerns
Internet videos: Learning from human videos, but these lack the critical "action" data of what controls were used
Unlike the clear path forward for language models, robotics researchers are still exploring which combination of these approaches will unlock human-level capabilities in robots. This creates what Abbeel calls "a complicated puzzle with many, many pieces."
Teleoperation: Teaching Robots By Hand
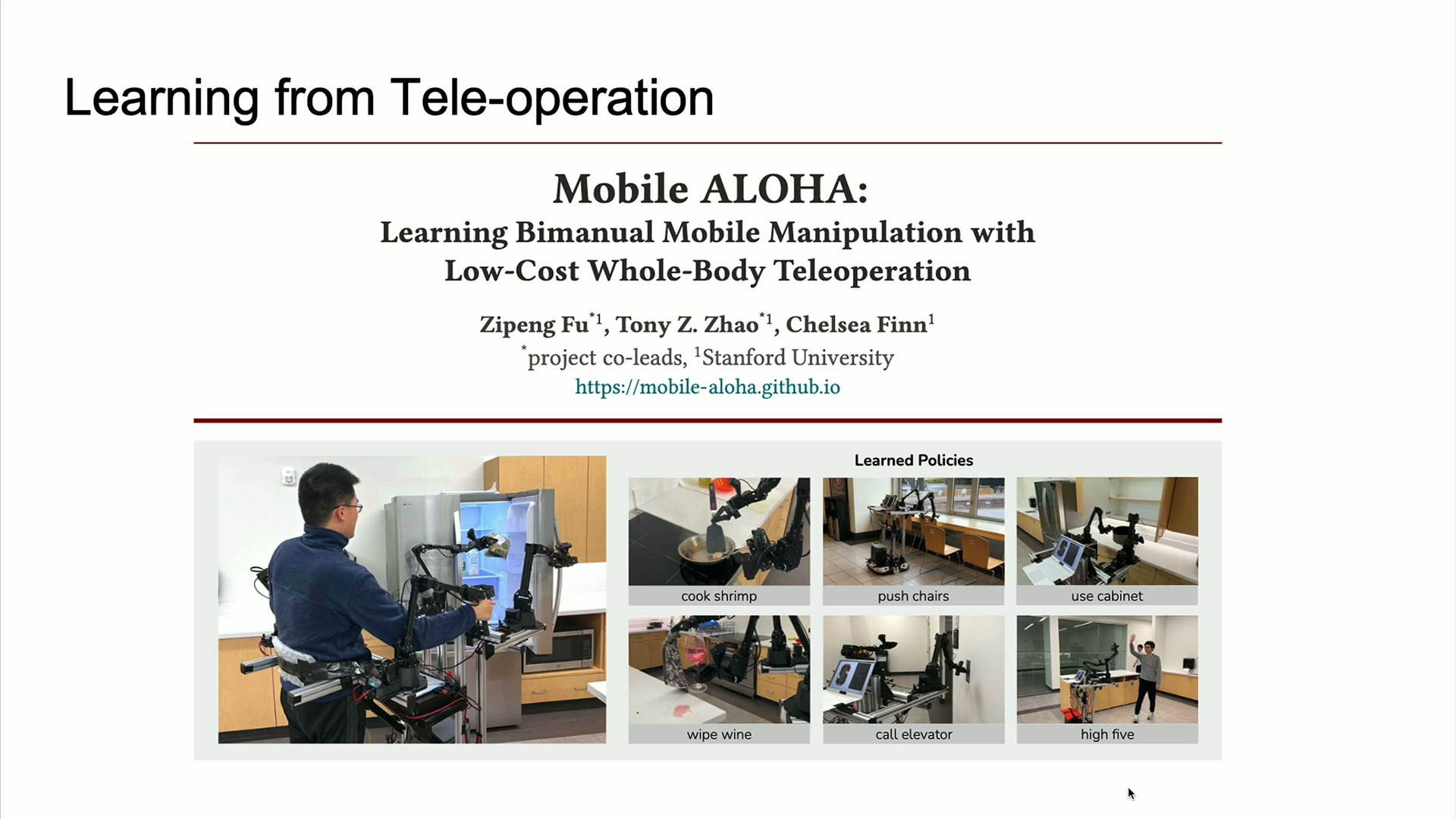
Among the promising approaches Abbeel highlighted is direct teleoperation - where humans control robots to demonstrate tasks. While previously considered too slow for practical data collection, recent breakthroughs are changing that perception.
Chelsea Finn's group at Stanford developed the Mobile ALOHA setup, which allows for relatively rapid data collection through teleoperation. Their spinoff company Pi has scaled this approach to teach robots complex tasks like laundry folding. What makes these systems impressive isn't just that they work, but that they demonstrate error-correcting behaviors when things don't go perfectly.
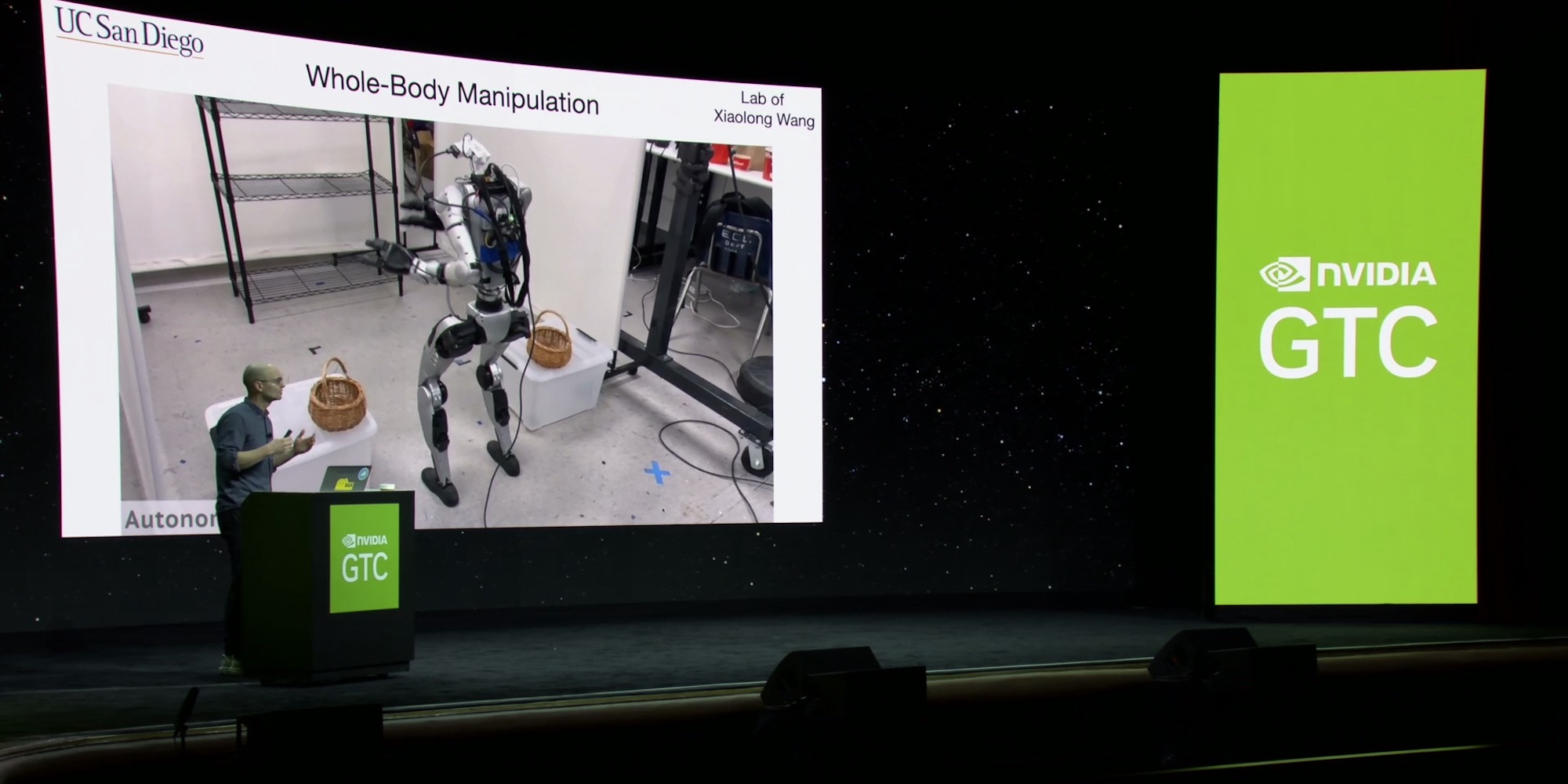
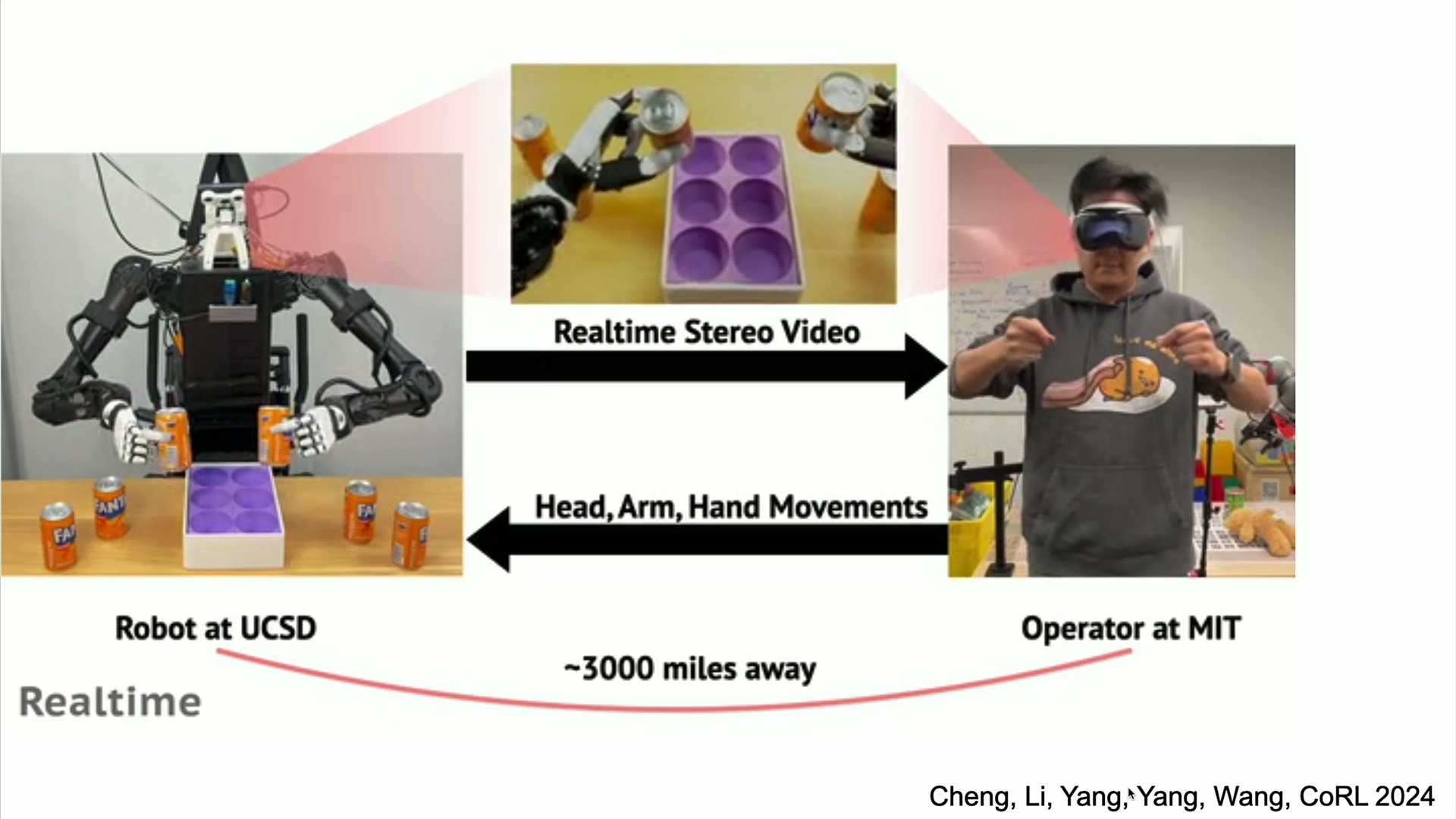
Even more exciting is remote teleoperation, as demonstrated by Shaolong Wang's group at UCSD in collaboration with MIT. Using an Apple Vision Pro headset, operators can control robots from across the country over standard internet connections. This opens up possibilities for distributed data collection and remote operation of humanoid robots.
Learning from Humans: Beyond Direct Control
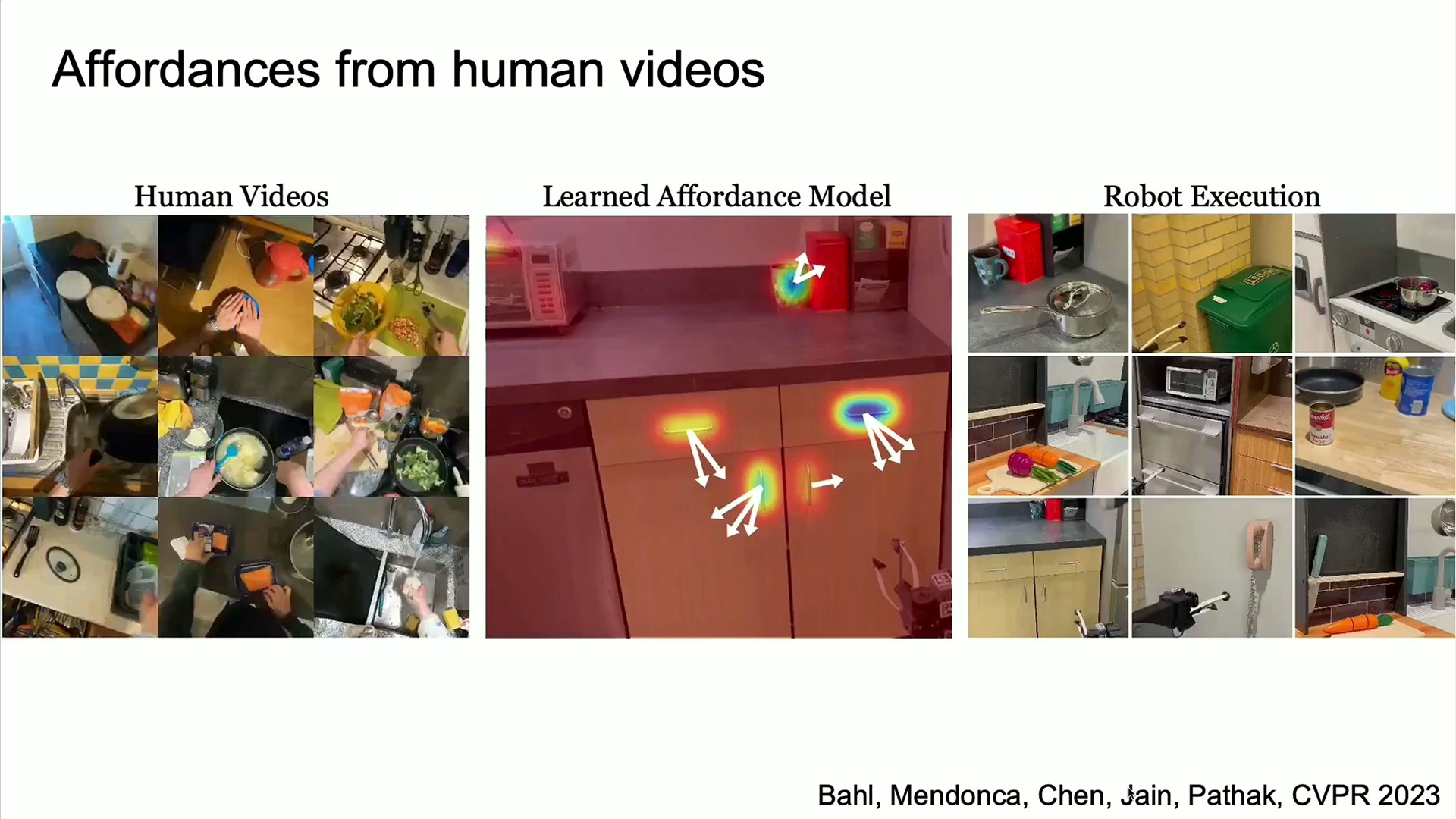
Another innovative approach comes from Deepak Pathak at CMU, who's teaching neural networks to identify important interaction points by watching humans. Rather than trying to copy every human movement exactly, this method helps robots develop "priors" about what's important in the environment - like handles, switches, and drawers.
This addresses a fundamental challenge in robotic learning: without guidance, robots waste enormous time exploring uninteresting interactions before stumbling upon useful ones. By observing how humans interact with objects, robots can focus their learning on promising areas.
Walking Before Running: Locomotion Breakthroughs
Before robots can perform complex manipulation tasks, they need to master movement. Abbeel highlighted impressive work from Berkeley on teaching robots to walk over challenging terrain by combining multiple data sources:
Neural network-controlled simulated robots (with full action data)
Model-based controller data (without actions)
Human motion capture data
Internet videos of people walking
By training a transformer model on this heterogeneous data and fine-tuning with reinforcement learning, researchers created robots that can hike over four miles of rugged terrain. Other projects demonstrated robots running 100-meter sprints in just over 20 seconds and performing athletic jumps and goalie moves.
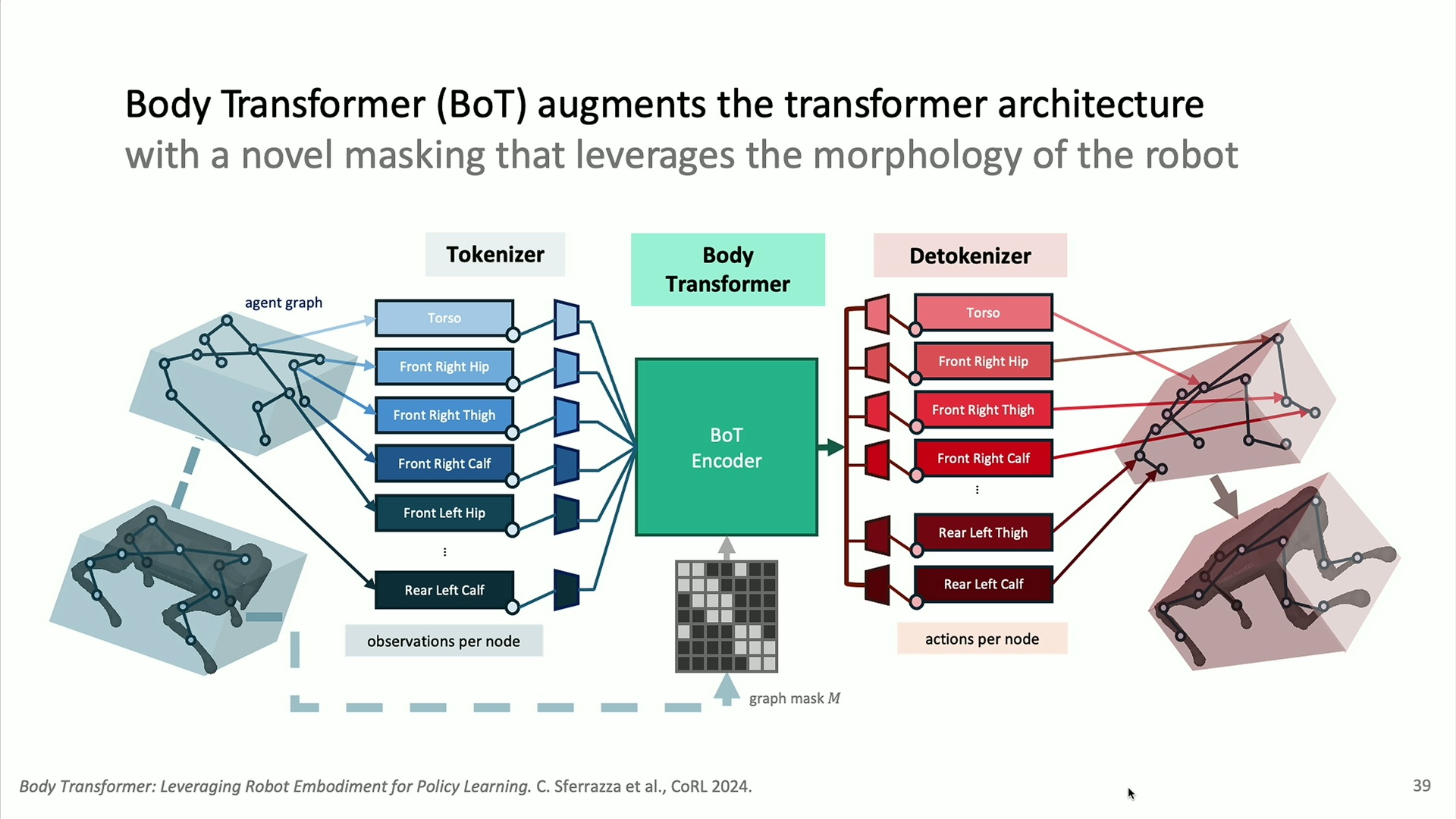
One of the most intriguing research directions Abbeel presented was the Body Transformer - a neural architecture designed specifically for controlling robot bodies.
Unlike standard transformers that connect everything to everything else, Body Transformers incorporate the physical structure of the robot into their architecture. This mimics how our nervous system works - we have shorter neural pathways for quick reactions (like pulling your hand away from something hot) and longer pathways for complex reasoning. This approach offers several advantages:
Computational efficiency by reducing unnecessary connections
Multi-frequency reasoning with fast local connections and slower distant ones
Better reinforcement learning by localizing credit assignment
The results are impressive - Body Transformers can learn from just three demonstrations what would take traditional architectures many more examples to master.
Simulation to Reality: Bridging the Gap
For researchers looking to join this field, Abbeel highlighted the importance of simulation environments like "Humanoid Bench" and "MJX Playground" (a collaboration between Google DeepMind and NVIDIA). These platforms allow anyone with a decent GPU to start developing AI for humanoid robots without needing expensive physical hardware.
The challenge, however, is ensuring that what works in simulation transfers successfully to real robots. The MJX Playground environment addresses this by:
Matching simulation closely to physical reality
Enabling fast simulation to generate more training data
Supporting a wide range of robot platforms
Providing one-line installation that works even on Google Colab
Abbeel demonstrated this sim-to-real transfer live on stage, showing a robot executing a walking policy trained entirely in simulation. The robot maintained balance even when disturbed, showcasing the robustness of the transferred policy.
The Road Ahead: Open Challenges and Opportunities
Despite the impressive progress, Abbeel emphasized that we haven't yet converged on a universal approach to building AI for humanoid robots. Instead, we're seeing exciting developments across multiple fronts:
Teleoperation for direct teaching
Simulation-to-real transfer techniques
Real-world reinforcement learning
Learning from videos of humans
Leveraging internet video and text
Importantly, this field remains accessible to newcomers. Unlike large language models that require massive computing budgets, many robotics breakthroughs can start with a single GPU and simulation environment.
Peter Abbeel's presentation reveals a field on the cusp of transformation. The rapid advancement of robot hardware, combined with innovative approaches to AI development, suggests we may soon see humanoid robots performing useful tasks in our world.