geeky NEWS: Navigating the New Age of Cutting-Edge Technology in AI, Robotics, Space, and the latest tech Gadgets
As a passionate tech blogger and vlogger, I specialize in four exciting areas: AI, robotics, space, and the latest gadgets. Drawing on my extensive experience working at tech giants like Google and Qualcomm, I bring a unique perspective to my coverage. My portfolio combines critical analysis and infectious enthusiasm to keep tech enthusiasts informed and excited about the future of technology innovation.
NVIDIA Unleashes GR00T N1: The World's First Open Foundation Model for Humanoid Robots
AI Summary
NVIDIA has released GR00T N1, the world's first open foundation model for humanoid robots, addressing global labor shortages while accelerating robotics development. The dual-system architecture, inspired by human cognition theories, enables robots to reason about their environment and plan actions with precision. With capabilities like grasping objects, performing multi-step tasks, and generalizing skills across environments, GR00T N1 promises to transform industries with minimal additional training required for adaptation.
March 22 2025 13:40
NVIDIA has unveiled Isaac GR00T N1, the world's first open, fully customizable foundation model designed specifically for humanoid robots. This revolutionary technology promises to transform industries by addressing global labor shortages while accelerating the development of multi-capable humanoid robots.
For decades, robotics development has been constrained by specialized programming for specific tasks. Each new function required extensive custom coding, limiting the versatility and adaptability of robots in real-world scenarios. NVIDIA's Isaac GR00T N1 changes this paradigm fundamentally by bringing generalized reasoning and skills to humanoid robots—essentially creating the robotic equivalent of what ChatGPT did for language models.
"The age of generalist robotics is here," declared Jensen Huang, founder and CEO of NVIDIA during his GTC keynote presentation. "With NVIDIA Isaac GR00T N1 and new data-generation and robot-learning frameworks, robotics developers everywhere will open the next frontier in the age of AI."
A Human-Inspired Dual Architecture
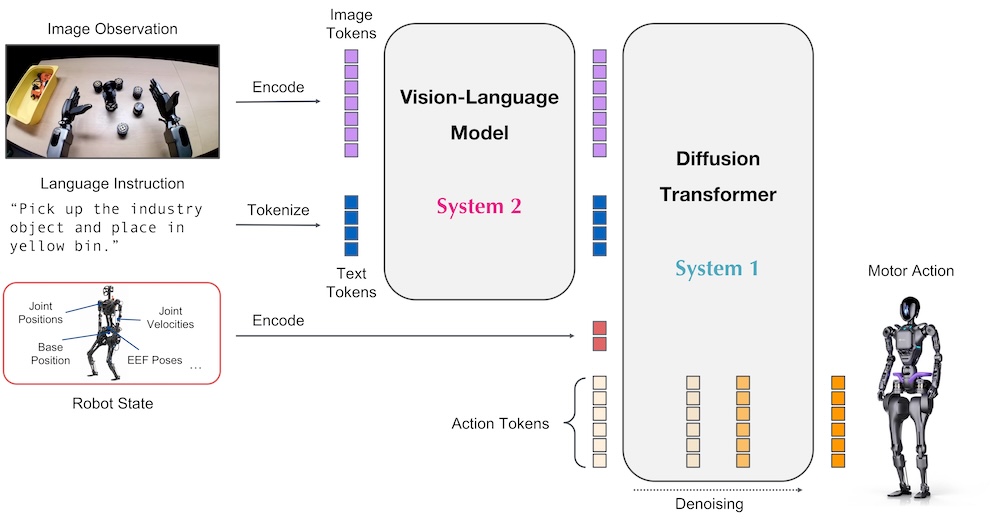
What makes GR00T N1 particularly fascinating is its dual-system architecture, inspired by human cognition theories. The model integrates:
System 1: A fast-thinking action model that mirrors human reflexes and intuition, allowing for quick responses to environmental changes
System 2: A slow-thinking model for deliberate, methodical decision-making and complex problem-solving
This architecture enables humanoid robots to reason about their environment and received instructions to plan actions (System 2), and then translate these plans into precise, continuous physical movements (System 1). System 1 is trained on both human demonstration data and massive synthetic data generated through NVIDIA's Omniverse platform.
What Can GR00T N1 Actually Do?
GR00T N1's capabilities extend across a wide range of practical applications:
Grasping objects of various shapes and sizes
Moving objects with one or both arms
Transferring items between hands
Performing multi-step tasks requiring long context understanding
Generalizing skills across different environments and scenarios
These foundational capabilities translate directly to industrial applications such as material handling, packaging, inspection, and even domestic tasks like tidying up spaces.
During his GTC demonstration, Huang showcased 1X's humanoid robot autonomously performing household tidying tasks using a post-trained policy built on GR00T N1—highlighting how quickly the model can be adapted to specific use cases with minimal additional training.
The Data Challenge and NVIDIA's Ingenious Solution
One of the most significant obstacles in robotics development has been the acquisition of training data. Human demonstration data is inherently limited—after all, people can only demonstrate actions for 24 hours a day. To overcome this limitation, NVIDIA introduced the Isaac GR00T Blueprint for synthetic manipulation motion generation.
This system, built on Omniverse and NVIDIA Cosmos Transfer world foundation models, allows developers to generate vast amounts of synthetic motion data from just a small number of human demonstrations. In one impressive example, NVIDIA generated 780,000 synthetic trajectories—equivalent to 6,500 hours or nine continuous months of human demonstration data—in just 11 hours.
When combined with real data, this synthetic data improved GR00T N1's performance by 40% compared to using only real data, demonstrating the power of this approach to the data bottleneck problem.
The Power of Collaboration: NVIDIA, Google DeepMind, and Disney Research
Beyond the GR00T N1 model itself, NVIDIA announced a collaboration with Google DeepMind and Disney Research to develop Newton, an open-source physics engine optimized for robot learning. Built on the NVIDIA Warp framework, Newton will be compatible with simulation frameworks like Google DeepMind's MuJoCo and NVIDIA Isaac Lab.
This collaboration promises to accelerate robotics machine learning workloads by more than 70x through the development of MuJoCo-Warp, which will be available through Google DeepMind's MJX open-source library and through Newton.
Disney Research's involvement is particularly intriguing, as they plan to use Newton to advance their robotic character platform that powers next-generation entertainment robots. During Huang's keynote, Star Wars-inspired BDX droids joined him on stage, showcasing the entertainment applications of this technology.
"The BDX droids are just the beginning," said Kyle Laughlin, senior vice president at Walt Disney Imagineering Research & Development. "We're committed to bringing more characters to life in ways the world hasn't seen before, and this collaboration with Disney Research, NVIDIA and Google DeepMind is a key part of that vision."
Why This Matters: The Bigger Picture
NVIDIA's announcement comes at a crucial time when global labor shortages are estimated to exceed 50 million people. Humanoid robots with generalized skills could help address critical gaps in manufacturing, logistics, healthcare, and other sectors facing workforce challenges.
Perhaps the most eye-opening part of Huang's comments was his straightforward economic analysis. "The going rate for renting a human robot is probably $100,000 and I think it's pretty good economics," he stated. This cuts to the heart of why humanoid robots are being developed in the first place—they represent potentially tremendous economic value. At that price point, humanoid robots would be competitive with human labor in many high-skilled manufacturing contexts, especially when you factor in:
24/7 operation capabilities
No benefits or time off required
Consistent performance without fatigue
Potential for rapid upgrades and improvements
Huang specifically pointed to manufacturing as the first industry likely to see widespread adoption of humanoid robots. "I think it ought to go to factories first. And the reason for that is because the domain is much more guard-railed, and the use case is much more specific," he explained.
The open nature of GR00T N1 democratizes access to advanced robotics capabilities, potentially accelerating innovation across the industry. Leading humanoid developers worldwide—including Agility Robotics, Boston Dynamics, Mentee Robotics, and NEURA Robotics—have already gained early access to GR00T N1.
GR00T N1's neural network architecture merges a vision-language foundation model with a diffusion transformer head that denoises continuous actions. This allows the system to process multimodal inputs, including language and images, to perform manipulation tasks in diverse environments. The model is trained on an expansive humanoid dataset consisting of real captured demonstration data, synthetic data generated using components of NVIDIA Isaac GR00T Blueprint, and Internet-scale video data. This diverse training regimen enables GR00T N1 to generalize across different tasks and environments.
NVIDIA has made GR00T N1 training data and task evaluation scenarios available for download from Hugging Face and GitHub. The Newton physics engine is expected to be available later this year, further enhancing the development environment for humanoid robotics.