geeky NEWS: Navigating the New Age of Cutting-Edge Technology in AI, Robotics, Space, and the latest tech Gadgets
As a passionate tech blogger and vlogger, I specialize in four exciting areas: AI, robotics, space, and the latest gadgets. Drawing on my extensive experience working at tech giants like Google and Qualcomm, I bring a unique perspective to my coverage. My portfolio combines critical analysis and infectious enthusiasm to keep tech enthusiasts informed and excited about the future of technology innovation.
Humanoid Footwork: How Boston Dynamics is Perfecting the Robot in Walk, Run, Crawl, and Breakdance
AI Summary
Boston Dynamics' Atlas robot has demonstrated advanced movements through reinforcement learning (RL) combined with human motion capture references, marking a shift from traditional programming to adaptive movement patterns that can handle variations and unexpected situations.
March 19 2025 19:28
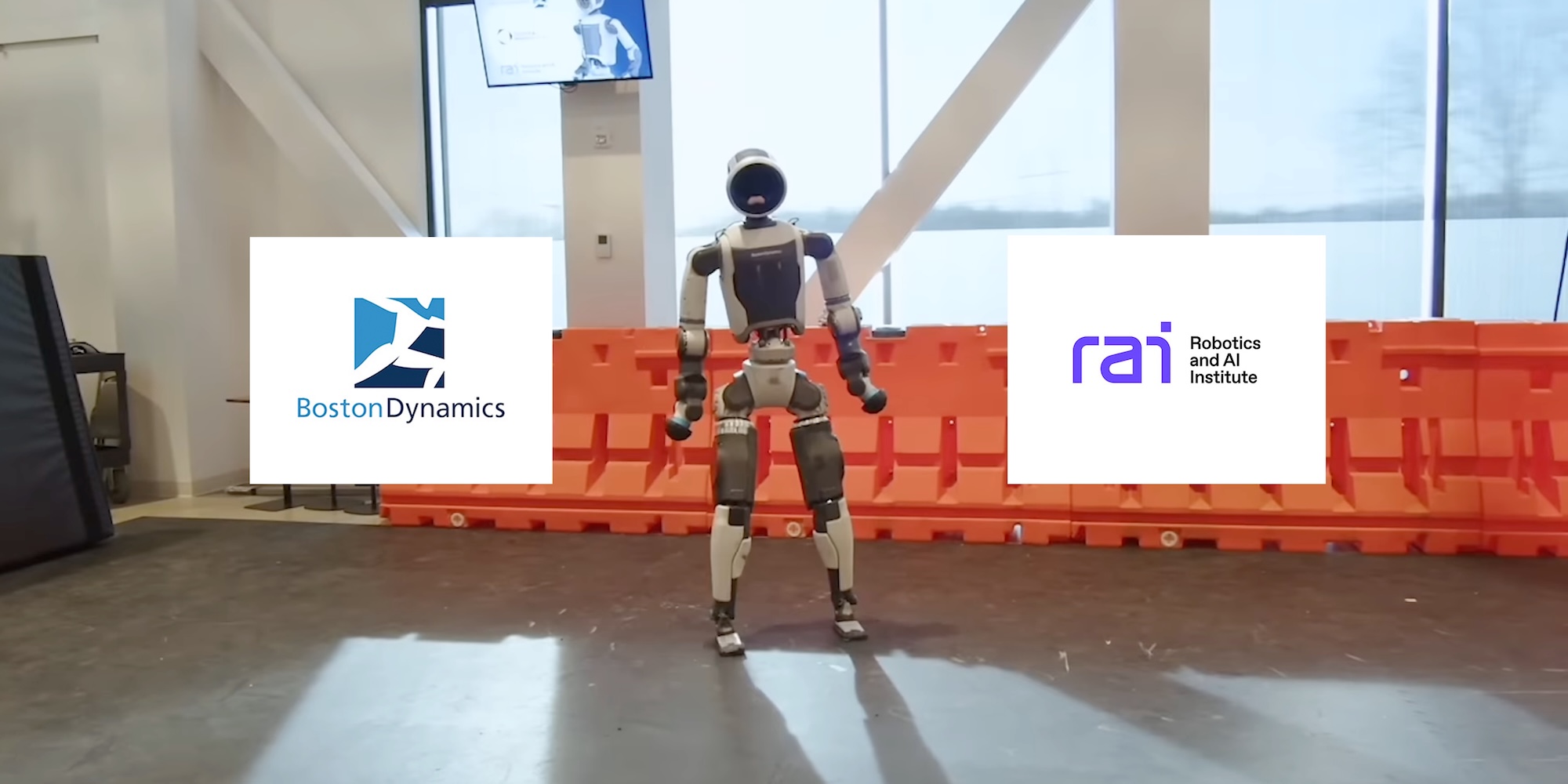
The world of robotics took another spectacular leap forward today as Boston Dynamics, in partnership with the Robotics and AI Institute (RAI Institute), unveiled their latest Atlas robot capabilities. In a new video released on March 19, 2025, Atlas demonstrates an unprecedented range of fluid movements—walking, running, and crawling with a grace that feels eerily human. But what makes this particular demonstration special isn't just the movements themselves, but how Atlas learned them: through reinforcement learning (RL) combined with human motion capture references.
The Evolution of Atlas
For those who have followed Boston Dynamics' journey, Atlas has been something of a celebrity in the robotics world. From its early days of awkward movements and frequent falls to backflipping and parkour demonstrations, Atlas has embodied the rapid evolution of humanoid robotics. However, the traditional approach to robot movement has often relied on meticulously programmed routines and pre-defined trajectories—essentially telling the robot exactly how to move.
This new demonstration represents a fundamental shift in approach. Instead of precisely programming each movement, Boston Dynamics has taught Atlas to learn movements through reinforcement learning, a branch of machine learning where an agent learns by interacting with its environment, receiving rewards for desired behaviors.
Understanding Reinforcement Learning in Robotics
Reinforcement learning works on a conceptually simple principle: the robot tries different actions, receives feedback on how well those actions worked, and adjusts its behavior accordingly. Over time, through countless iterations, the robot develops "policies"—essentially decision-making strategies—that maximize its chances of success.
It allows robots to develop more adaptive, responsive movement patterns that can handle variations and unexpected situations. Rather than following rigid instructions, Atlas is now making real-time decisions about how to move based on what it has learned works best.
The Human Element: Motion Capture and Animation
The Boston Dynamics team didn't just set Atlas loose to learn from scratch. According to their announcement, they incorporated human motion capture and animation references into the learning process. This hybrid approach uses human movement as a starting point, giving Atlas "examples" of effective movement patterns. This combination is particularly powerful because:
It provides a baseline of natural, efficient movements derived from human expertise
It speeds up the learning process by starting with movements that are already known to work
It helps avoid the "uncanny valley" effect by ensuring movements look natural and fluid
It allows for the incorporation of specific movements that might be difficult to discover through pure trial and error
The collaboration between Boston Dynamics and the Robotics and AI Institute brings together Boston Dynamics' world-class robotics hardware and engineering expertise with the RAI Institute's cutting-edge AI research capabilities.
The RAI Institute has been at the forefront of developing advanced reinforcement learning algorithms specifically designed for robotics applications. Their work has focused on creating learning systems that can efficiently transfer from simulation to real-world environments—one of the greatest challenges in applying RL to physical robots.
Technical Challenges and Breakthroughs
Implementing reinforcement learning on a complex physical robot like Atlas presents numerous technical challenges:
The reality gap: Behaviors that work in simulation often fail in the real world due to physical factors like friction, mass distribution, and motor limitations.
Sample efficiency: Physical robots can't run millions of learning trials like simulated ones can, so learning algorithms must be incredibly efficient.
Safety: During the learning process, the robot might attempt movements that could damage itself or its environment.
Hardware limitations: Even Atlas, with its sophisticated hydraulic systems, has physical constraints that limit what movements are possible.
The breakthrough demonstrated in this video suggests that Boston Dynamics and the RAI Institute have made significant progress in addressing these challenges. The fluid transition between walking, running, and crawling behaviors indicates that the learning system has developed a unified understanding of locomotion rather than treating each movement type as a separate problem.
Implications for the Future of Robotics
While Atlas remains primarily a research platform, the techniques developed through this work have applications far beyond humanoid robotics. The combination of reinforcement learning and human motion references could be applied to:
Industrial robots that need to work alongside humans
Prosthetic limbs that provide more natural movement
Assistive robots for healthcare and elder care
Emergency response robots that need to navigate complex, unpredictable environments
As we watch Atlas walk, run, and crawl with increasing naturalism, we're witnessing the early stages of a profound transformation in how machines move and interact with their environment. The dance between human ingenuity and machine learning continues, and with each new demonstration, the line between programmed behavior and learned capability becomes increasingly blurred.